Robotics and InteractionS
- ris -
The RIS team conducts research along the following themes:
Decisional Architectures

The Decisional Architecture theme covers researches in Validation and Verification in Robotics as well as Integration of Decision in Robotics, etc.
Planning & Learning
Texte à modifier dans l’interface d’édition: champ 'description' de la page Sujet de Recherche.
Motion Planning
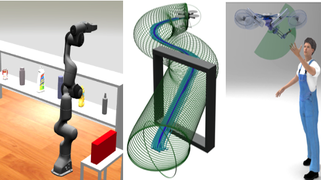
Development of algorithms for manipulation planning, control-aware as well as human-aware motion planning
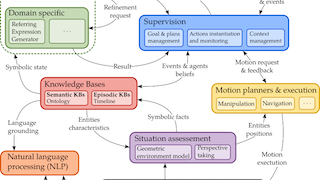
Human Robot Interactions/Cooperations
Consider all decisional aspects to build a consistent architecture dedicated to human-robot interaction management
Aerial Robotics

Our objective is to design, model, and control drones that can physically interact with the environment and, in particular, with humans.
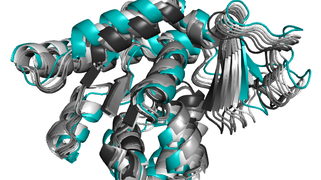
Structural Bioinformatics
Development of algorithms for modeling and designing flexible biomolecules such as proteins
Scientific executive

ITA contractor
Postdoctoral
PhD
Intern
PhD guest
Partnership guest
Visitor
Latest publications
2027
Preprints, Working Papers, ...
Malik Ghallab. Des valeurs en science : neutralité ou engagement ?. 2027. ⟨hal-05653297v1⟩
2026
Journal articles
Book sections
Conference papers
Other documents
@softwareversion
Preprints, Working Papers, ...
Malik Ghallab. L'IA pour l'éducation : quelles remises en cause ?. 2026. ⟨hal-05610841v1⟩
2025
Journal articles
Books
Conference papers
Other documents
Preprints, Working Papers, ...
Félix Ingrand. A formal implementation of Behavior Trees to act in robotics. 2025. ⟨hal-04954024v2⟩
2024
Journal articles
Book sections
Conference papers
Other documents
@softwareversion
Félix Ingrand. BT2Fiacre (Behavior Tree 2 Fiacre). 2024. ⟨hal-04720141⟩
Reports
Preprints, Working Papers, ...
Félix Ingrand. ProSkill: A formal skill language for acting in robotics. 2024. ⟨hal-04502274⟩
2023
Journal articles
Conference papers
Other documents
@softwareversion
Félix Ingrand. ProSkill. 2023. ⟨hal-04738223⟩
Preprints, Working Papers, ...
2022
Journal articles
Book sections
Conference papers
Proceedings
Reports
Preprints, Working Papers, ...
2021
Journal articles
Books
Book sections
Conference papers
Preprints, Working Papers, ...
Collaborations
With other LAAS research teams (beyond ROB): Photo, TSF, Vertics, M3, ROC
With Toulouse area academic partners: Cerfacs, ENAC, ISAE, INRAE, IMT, IRIT, ONERA, IRAP, CLEE (half of the group Ph.D’s are co-advised out of RIS)
Industrial partners: Airbus, EasyMile, Naval Group, Safran, etc
Projects
- European and international
- H2020 AIPlan4EU« Bringing AI Planning to the European AI On-Demand Platform »
- Horizon Europe euROBIN « European ROBotics and AI Network »
- Horizon Europe TUPLE « Trustworthy Planning and Scheduling with Learning and ExplanationS »
- Horizon Europe ITN TRAIL « TRAnsparent InterpretabLe robots »
- ANR international AI4HRI « Artificial Intelligence for Human-Robot Interactions » (France / Germany / Japan)
- ANR International ELSA « Effective Learning of Social Affordances for human-robot interaction » (France / Austria)
- National
- ANR CAMP « Control Aware Motion Planning » (INRIA Rainbow)
- ANR ASTRID Discuter « Dialogue Interactif Structuré, Consolidé et Unifié pour la réalisation de Tâches En Robotique »
- ANR Flying CoWorker « L’équipier volant »
- ANR ASTRID Panache « Déploiement d’une flotte de drones pour le suivi temps-réel de pollution atmosphérique accidentelle »
- ANR CORFLEX « Computational Design of Intrinsically Disordered Proteins: Application to Flexible Linkers »
- ANR ANDES « Artificial-Intelligence-based Methods for Nanobody Design »
- Regional
- COCOPIL « Cobots Conversationnels pour Processus Industriels et Logistique »
- Défi-clé (two postDocs, one visitor)
- Industry
- Cifre PhD « Perception de véhicules autonomes en conditions environnementales de faible visibilité » (Easymile)
- Cifre PhD « Planification à initiative partagée pour une flotte de robots autonomes » (Safran ED)
Software
- MoMA (Molecular Motion Algorithms) : https://moma.laas.fr/ , https://gitlab.laas.fr/moma
THESIS / HDR
2026
2025
2024
2023
2022
2021
2020
2019
2018
Thierry Sotiropoulos, Thèse: Test aléatoire de la navigation de robots dans des mondes virtuels
2017
Sandra Devin, Thèse: Processus décisionnels lors d'action conjointe homme-robot
Laurent Denarie, Thèse: Méthodes inspirées de la robotique pour l’aide à la conception de protéines
2016
Michelangelo Fiore, Thèse: Processus décisionnels pour l'interaction homme-robot
DEPARTMENT
Jobs / Interships
REJOINDRE
Notre équipe de recherche
Pour plus d’informations sur les offres d’emploi, vous pouvez contacter












