Motion Planning
Development of algorithms for manipulation planning, control-aware as well as human-aware motion planning
Task and Motion Planning (TAMP)

TAMP problems involve generating sequences of symbolic actions and their corresponding motions that enable a robot to achieve a desired goal. The primary challenge lies in addressing the high combinatorial complexity of combined task and motion planning. Traditional methods often require an extensive number of calls to motion planners to validate each planned action, making planning time-consuming and impractical for real-world applications. In our recent work [1][2] we leveraged deep learning methods to predict action and grasp feasibility. By doing so, we reduce the reliance on motion planners aiming to significantly accelerate the planning process.
Control-Aware Motion planning (CAMP)
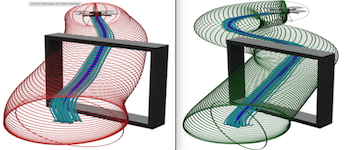
Nowadays, motion planners can solve complex problems for high-dimensional, possibly dynamical, systems. However, most planners do not consider the unavoidable presence of robot model uncertainties and of the feedback controller that will track the planned trajectories in presence of these uncertainties. This can often lead to a poor robustness and potential loss of optimality at runtime. In our recent work [3] we build on the recent notion of ‘sensitivity’ to propose a CAMP algorithm able to generate trajectories that are intrinsically robust against parametric uncertainties for the robot/controller pair.
Human-aware Motion planning (HAMP)
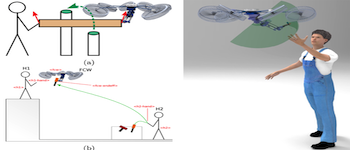
To allow the robots “co-exist” with humans, human-robot interaction needs to be considered for computing human-aware motions of the robot, ie. safe, reliable and socially acceptable motions that take into account a motion model of the human as well as his preferences and needs. In our recent work [4] propose a reactive optimization-based HAMP technique for computing motions of a flying co-worker drone satisfying the kinematic constraints of the drone while ensuring the visibility and ease of the humans present in the environment.
References
[1] Learning to Predict Action Feasibility for Task and Motion Planning in 3D Environments. Smail Ait Bouhsain, Rachid Alami, Thierry Simeon. IEEE International Conference on Robotics and Automation (ICRA), 2023 <hal>
[2] Simultaneous Action and Grasp Feasibility Prediction for Task and Motion Planning through Multi-Task Learning. Smail Ait Bouhsain, Rachid Alami, Thierry Simeon. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 <hal>
[3] A Sensitivity-Aware Motion Planner to Generate Intrinsically-Robust Trajectories. Simon Wasiela, Paolo Robuffo Giordano, Juan Cortés, Thierry Simeon. IEEE International Conference on Robotics and Automation (ICRA), 2023 <hal>
[4] KHAOS: a Kinematic Human Aware Optimization-based System for Reactive Planning of Flying-Coworker. Jérôme Truc, Phani-Teja Singamaneni, Daniel Sidobre, Serena Ivaldi, Rachid Alami. IEEE International Conference on Robotics and Automation (ICRA), 2022 <hal>












