LAAS-CNRS
Research laboratory specialized in system analysis and architecture
Our mission: meeting the major future challenges of the laboratory's 4 historical disciplinary fields: computer science, robotics, automatics and micro and nano systems
NEWS FROM LAAS-CNRS
Inauguration of the Jorowila IRP: A Transatlantic Bridge for Robotics and Wireless Technologies
The Jorowila International Research Project (NYU-CNRS Joint Robotics and Wireless Laboratory), led by the Gepetto team at LAAS-CNRS and New York University, was officially launched on April 17, 2026, at NYU. This project is developing an ambitious initiative to bring together French and American expertise in embedded robotics and advanced wireless technologies.
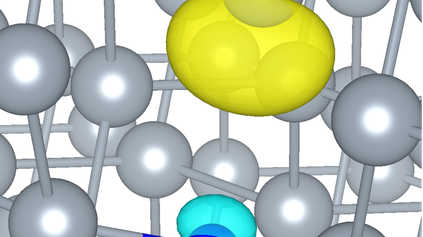
Better Identification of Atomic Defects in Crystals Using Quantum Computation
Accurately identifying point defects in a crystal is a major challenge for microelectronics and emerging quantum technologies, where a single misplaced atom can make all the difference.
Article of the Year for S4m team in Sports Engineering Journal!
The article “Quantitative Study of a Full-Scale Pedaling Mannequin for Wind Tunnel Testing,” written by Pascal Acco, Georges Soto-Romero, and Sébastien Terol of the S4M team for the Sports Engineering Journal, was named Article of the Year.
Calendar
BOARD IN
TO THE HEART
OF LAAS-CNRS
UNDERSTAND
LAAS-CNRS ACTIVITY
855
Women and men
serving the challenges
of the future









in one clic





LAAS-CNRS
7, av. du colonel Roche
BP 54200
31031 Toulouse cedex 4
France
GPS : 43.563545, 1.476923
Tél :







