Robotique et InteractionS
- ris -
Le défi des recherches que nous menons porte sur les capacités des machines aunonomes à agir rationnellement dans des environnements dynamiques pour accomplir une grande diversité de tâches.
Architecture Décisionnelle

Le thème Architecture Décisionnelle recouvre des recherche en Validation et Vérification, ainsi que l'Intégration des fonctions décisionnelles en robotique.
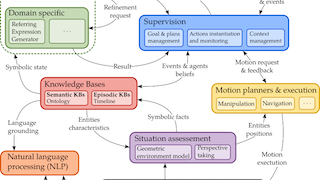
Human Robot Interactions/Cooperations
Consider all decisional aspects to build a consistent architecture dedicated to human-robot interaction management
Responsable
Cadre scientifique

ITA contractuel
Post-doctorant
Doctorant
Stagiaire
Accueil Thèse
Accueil partenariat
Visiteur
Dernières Publications
2027
Pré-publications, documents de travail
Malik Ghallab. Des valeurs en science : neutralité ou engagement ?. 2027. ⟨hal-05653297⟩
2026
Articles dans une revue
Chapitres d’ouvrages
Communications dans un congrès
@softwareversion
Pré-publications, documents de travail
Malik Ghallab. L'IA pour l'éducation : quelles remises en cause ?. 2026. ⟨hal-05610841⟩
2025
Articles dans une revue
Livres
Communications dans un congrès
Autres documents
Pré-publications, documents de travail
Félix Ingrand. A formal implementation of Behavior Trees to act in robotics. 2025. ⟨hal-04954024v2⟩
2024
Articles dans une revue
Chapitres d’ouvrages
Communications dans un congrès
Autres documents
@softwareversion
Félix Ingrand. BT2Fiacre (Behavior Tree 2 Fiacre). 2024. ⟨hal-04720141⟩
Rapports
Pré-publications, documents de travail
Félix Ingrand. ProSkill: A formal skill language for acting in robotics. 2024. ⟨hal-04502274⟩
2023
Articles dans une revue
Communications dans un congrès
Autres documents
@softwareversion
Félix Ingrand. ProSkill. 2023. ⟨hal-04738223⟩
Pré-publications, documents de travail
2022
Articles dans une revue
Chapitres d’ouvrages
Communications dans un congrès
Comptes rendus de conférences
Rapports
Pré-publications, documents de travail
2021
Articles dans une revue
Livres
Chapitres d’ouvrages
Communications dans un congrès
Pré-publications, documents de travail
Collaborations
Avec des équipes du LAAS (hormis ROB): Photo, TSF, Vertics, M3, ROC
Partenaires academiques Toulousains: Cerfacs, ENAC, ISAE, INRAE, IMT, IRIT, ONERA, IRAP, CLEE (la moitié des thèses de RIS sont coencadrées en dehors de RIS)
Partenaires Industriels: Airbus, EasyMile, Naval Group, Safran, etc
Projects
- Européens et internationals
- H2020 AIPlan4EU« Bringing AI Planning to the European AI On-Demand Platform »
- Horizon Europe euROBIN « European ROBotics and AI Network »
- Horizon Europe TUPLE « Trustworthy Planning and Scheduling with Learning and ExplanationS »
- Horizon Europe ITN TRAIL « TRAnsparent InterpretabLe robots »
- ANR international AI4HRI « Artificial Intelligence for Human-Robot Interactions » (France / Germany / Japan)
- ANR International ELSA « Effective Learning of Social Affordances for human-robot interaction » (France / Austria)
- Nationals
- ANR CAMP « Control Aware Motion Planning » (INRIA Rainbow)
- ANR ASTRID Discuter « Dialogue Interactif Structuré, Consolidé et Unifié pour la réalisation de Tâches En Robotique »
- ANR Flying CoWorker « L’équipier volant »
- ANR ASTRID Panache « Déploiement d’une flotte de drones pour le suivi temps-réel de pollution atmosphérique accidentelle »
- ANR CORFLEX « Computational Design of Intrinsically Disordered Proteins: Application to Flexible Linkers »
- ANR ANDES « Artificial-Intelligence-based Methods for Nanobody Design »
- Régionals
- COCOPIL « Cobots Conversationnels pour Processus Industriels et Logistique »
- Défi-clé (two postDocs, one visitor)
- Industries
- Cifre PhD « Perception de véhicules autonomes en conditions environnementales de faible visibilité » (Easymile)
- Cifre PhD « Planification à initiative partagée pour une flotte de robots autonomes » (Safran ED)
Software
- MoMA (Molecular Motion Algorithms) : https://moma.laas.fr/ , https://gitlab.laas.fr/moma
Thèses / HDR soutenues
2025
2024
2023
2022
2021
2020
2019
2018
Thierry Sotiropoulos, Thèse: Test aléatoire de la navigation de robots dans des mondes virtuels
2017
Sandra Devin, Thèse: Processus décisionnels lors d'action conjointe homme-robot
Laurent Denarie, Thèse: Méthodes inspirées de la robotique pour l’aide à la conception de protéines
2016
Michelangelo Fiore, Thèse: Processus décisionnels pour l'interaction homme-robot
DÉPARTEMENT
Emplois / Stages
REJOINDRE
Notre équipe de recherche
Pour plus d’informations sur les offres d’emploi, vous pouvez contacter












