Le département rob
Robotique
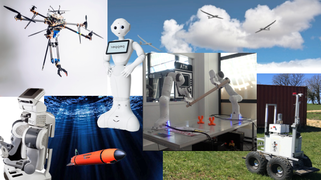
Le département robotique développe un champ de recherche pluri-thématique portant sur le développement de fonctions de perception, de décision, de génération de mouvements et de communication des robots, destinées à être testées dans des environnements réels non maîtrisés. Il est doté d’une plateforme robotique très complète.
responsable
Le département est structuré en trois équipes de recherche qui travaillent en synergie et dont les domaines d’expertise sont complémentaires.
- L’équipe « Gepetto », spécialiste du mouvement des systèmes anthropomorphes, a trois objets de recherche: le robot humanoïde, le mannequin numérique et l’Homme. Son expertise est centrée sur la planification, la génération et la commande du mouvement de ces systèmes poly-articulés instables. Elle mène une activité interdisciplinaire à l’intersection de la robotique, des neurosciences et de la biomécanique avec un intérêt particulier pour la conception de muscles artificiels.
- L’activité de l’équipe « Robotique, action et perception » (RAP), experte en traitement du signal, est centrée sur le lien «perception-action», avec un focus sur la vision et l’audition. Ses axes de recherche sont : la détection, la segmentation, l’identification et le suivi de personnes et d’objets; la perception et la commande en environnement dynamique et l’élaboration de capteurs intégrés. Les défis à relever sont la prise en compte de la variabilité de l’environnement et les contraintes d’embarquabilité et de calcul en temps-réel. L’équipe développe des solutions originales mettant l’accent sur la fusion probabiliste des données.
- L’équipe « Robotique et ses interactions » (RIS), focalise son expertise sur les interactions avec l’Homme et l’environnement. Ses activités couvrent l’architecture des systèmes, le contrôle et les interactions physiques, la planification temporelle et le raisonnement, la planification de mouvement et l’apprentissage. Les méthodes et algorithmes développés sont exploités dans trois principaux domaines: la robotique terrestre et aérienne, avec un point fort sur la coopération multi-robots et la modélisation de l’environnement, la robotique cognitive et d’interaction et le mouvement moléculaire.
Ces trois équipes entretiennent des collaborations étroites entre elles, ainsi qu’avec d’autres équipes du laboratoire rattachées à des départements scientifiques différents. Leurs travaux sont conduits dans le cadre d’un grand nombre de projets européens (ESA, FP7, H2020, EraNet, ERC, etc.), nationaux et régionaux, et des collaborations industrielles directes. Les applications concernent un large spectre de domaines: agriculture, transport, usine du futur, robotique de service, domotique et intelligence ambiante, réalité virtuelle et animation, surveillance et sécurité civile, exploration planétaire et espace, biochimie,...
Un grand nombre de logiciels développés par les chercheurs du département sont distribués en libre accès (GenoM3, GDHE, OpenPRS, Jafar, HPP, SoT, Pinocchio...).Texte à modifier dans l’interface d’édition: champ 'objectifs' de la page Departement.
NOS DOMAINES DE
RECHERCHE ET APPLICATIONS
Les trois équipes du département entretiennent des collaborations étroites entre elles, ainsi qu’avec d’autres équipes du laboratoire rattachées à des départements scientifiques différents.



LES CHAMPS DISCIPLINAIRES
COUVERTS PAR NOTRE DÉPARTEMENT



LES ÉQUIPES DU DÉPARTEMENT
Le département compte trois équipes de recherche. Robotique et Interactions (RIS), Robotique, Action, Perception (RAP) et GEPETTO.

gepetto
L’activité de recherche de l’équipe Gepetto est centrée sur l’analyse et la génération de mouvement des systèmes anthropomorphes. Créée en 2006, elle est rapidement devenue l’une des équipes phares en robotique humanoïde, unanimement reconnue pour son expertise en génération de …

rap
Les recherches de l'équipe RAP concernent la conception, le prototypage, l'implémentation et l'évaluation d'algorithmes pour : la perception visuelle ; la commande et la navigation référencées capteur ; la manipulation mobile interactive ; la modélisation et la fusion de données …
ris
L'équipe "Robotique et InteractionS" (RIS) développe un projet de recherche portant essentiellement sur les machines autonomes intégrant des capacités de perception, de raisonnement, d'apprentissage, d'action et de réaction.
Dernières Publications
2027
Pré-publications, documents de travail
Malik Ghallab. Des valeurs en science : neutralité ou engagement ?. 2027. ⟨hal-05653297v1⟩
2026
Articles dans une revue
Chapitres d’ouvrages
Communications dans un congrès
Autres documents
@softwareversion
Rapports
Pré-publications, documents de travail
Malik Ghallab. L'IA pour l'éducation : quelles remises en cause ?. 2026. ⟨hal-05610841v1⟩
2025
Articles dans une revue
Livres
Communications dans un congrès
Thèses de Master
Autres documents
@softwareversion
Pré-publications, documents de travail
Félix Ingrand. A formal implementation of Behavior Trees to act in robotics. 2025. ⟨hal-04954024v2⟩
2024
Articles dans une revue
Chapitres d’ouvrages
Communications dans un congrès
Thèses de Master
Autres documents
@softwareversion
Félix Ingrand. BT2Fiacre (Behavior Tree 2 Fiacre). 2024. ⟨hal-04720141⟩
Rapports
Marc Renaud. Polynômes particuliers à une variable. INSA Toulouse; LAAS CNRS. 2024. ⟨hal-04804020⟩
Pré-publications, documents de travail
Félix Ingrand. ProSkill: A formal skill language for acting in robotics. 2024. ⟨hal-04502274⟩
Thèses / HDR soutenues
2026
2025
2024
Joel Tari, Thèse: Représentation causale du problème de localisation et cartographie simultanées
Dinh Vinh Thanh Nguyen, Thèse: Etalonnage elasto-géométrique et dynamique de robots anthropomorphes.
Antoine Villemazet, Thèse: Navigation autonome d'un robot mobile dans un verger
Sébastien Kleff, Thèse: Retour en force en commande prédictive
2023
2022
Pierre-Alexandre Léziart, Thèse: Contrôle de la locomotion d'un robot quadrupède léger
Isabelle Maroger, Thèse: Transport de charges homme-robot
Quentin Portes, Thèse: Analyse multimodale de situations conflictuelles en contexte véhicule
Noelie Ramuzat, Thèse: Contrôle en force/couple pour des opérations industrielles
Alexis Nicolin, Thèse: Planification de tâches d'asservissement visuel en robotique
2021
Dimitri Leca, Thèse: Navigation autonome d'un robot agricole
2020
Diane Bury, Thèse: Planification de tâches de manipulation pour robots parallèles à câbles
Céline Pieters, Thèse: Les mots de la robotique : une approche rhétorique
2019
Kevin Giraud--Esclasse, Thèse: LOCOMOTION GENERALISEE REACTIVE BASEE VISION
Rohan Budhiraja, Thèse: Locomotion Multi-corps : Structure du problème et résolution efficace
2018
Florent Forget, Thèse: Modélisation et contrôle d'actionneurs pour la robotique humanoïde
Thierry Sotiropoulos, Thèse: Test aléatoire de la navigation de robots dans des mondes virtuels
2017
Nassime Blin, Thèse: Planification interactive de mouvement avec contact
Sandra Devin, Thèse: Processus décisionnels lors d'action conjointe homme-robot
Alexis Mifsud, Thèse: Estimation et stabilisation de l'état d'un robot humanoïde compliant
Guilhem Saurel, Thèse: Génération de mouvement en robotique mobile et humanoïde
Justin Carpentier, Thèse: Computational foundations of anthropomorphic locomotion
Mylène Campana, Thèse: Planification de mouvements pour acteurs digitaux
Laurent Denarie, Thèse: Méthodes inspirées de la robotique pour l’aide à la conception de protéines
Joseph Mirabel, Thèse: Planification de mouvement pour objets documentés
2016
Michelangelo Fiore, Thèse: Processus décisionnels pour l'interaction homme-robot
LES NEWS DU DÉPARTEMENT












