Methods and Algorithms in Control
- mac -
The MAC team works in the domain of automatic control: analysis and synthesis of control laws, estimation of state or parameters in a wide variety of systems.
Main Research Topics
Control Theory in the MAC team.
Presentation
The MAC team topics of interest in system and control theory
Head
Scientific executive

Intern
Scientific guest
PhD guest
Latest publications
2026
Journal articles
Book sections
Conference papers
Reports
Preprints, Working Papers, ...
2025
Journal articles
Book sections
Conference papers
Other documents
Preprints, Working Papers, ...
2024
Journal articles
Books
Book sections
Conference papers
Other documents
Yassine Ariba, Frédéric Gouaisbaut. Chaîne YouTube Capsules Automatique. 2024. ⟨hal-04902796⟩
Preprints, Working Papers, ...
2023
Journal articles
Conference papers
Other documents
Patents
Reports
Preprints, Working Papers, ...
2022
Journal articles
Books
Book sections
Conference papers
Reports
Preprints, Working Papers, ...
2021
Journal articles
Conference papers
Preprints, Working Papers, ...
The elements below concern the involvement of MAC members in different instances at the international and national levels.
International
Editors / Associate Editors
- IEEE-TAC Editorial Board : A Tanwani (Associate Editor)
- IFAC-Automatica : L Zaccarian (Senior Editor), S Tarbouriech (Senior Editor & Deputy Chief Editor)
- SICON : S Tarbouriech (EA)
- ESAIM-COCV : L Baudouin (EA)
- EJC : L Zaccarian (EA)
- ECC CEB : L Zaccarian (membres) D Peaucelle (IPC Chair ECC20)
- IEEE-CSS-CEB : G Garcia, D Peaucelle, I Queinnec (membres)
- IFAC-POL : D Peaucelle (Deputy Editor-in-Chief)
Learned Societies
- IEEE-CSS TC on Hybrid Systems : A Tanwani, S Tarbouriech, L Zaccarian (members)
- IEEE-CSS TC CACSD : D Peaucelle (members)
- IEEE-CSS BoG : L Zaccarian (elected membre)
- IFAC TC Nonlinear Control Systems : A Tanwani, S Tarbouriech, L Zaccarian (members)
- IEEE-CSS TC on Nonlinear Systems and Control : L Zaccarian (membre)
- IEEE-CSS TC SU : D Peaucelle (membre)
- IEEE-CSS : L Zaccarian (Electronic Information Committee)
- IFAC Policy Committee : D Peaucelle (membre)
- IFAC TC Biosystems and Bioprocesses : I Queinnec (membre)
- IFAC TC Distributed Parameter Systems : L Baudouin (membre)
- IFAC TC Modelling and Control of Enviromental Systems : I Queinnec (membre)
- IFAC TC Robust Control : D Peaucelle, S Tarbouriech (membres)
National
- DAS INS2I : I Queinnec
- CN S07 : S Tarbouriech
- CNES COMET SCA : D Peaucelle (co-host)
- GdR MACS : D Peaucelle (director)
SOFTWARE
- SATAW-Tool - Matlab Toolbox for analysis and controller design in presence of saturation elements in the control loop. LMI based functionalities are provided, where sector conditions are used for the saturation modeling. It is entirely written in Matlab and uses YALMIP for parsing LMIs, the optimization problems being solved using any SDP free solvers supported by YALMIP ou using LMILAB (not recommended for relatively high dimension problems). Can be freely downloaded and used. Developed by Isabelle Queinnec and Sophie Tarbouriech
- R-RoMulOC - Randomized and robust multi-objective control toolbox for Matlab. Modeling and robustness analysis based on LMI techniques. Works with parser YALMIP, all control problems are solved by SDP solvers such as SeDuMi, CSDP, DSDP, SDPT3... Can be freely downloaded and used. Main developer: Dimitri Peaucelle.
- HIFOO - A Matlab package for fixed-order controller design and H-infinity optimization, using a hybrid algorithm for nonsmooth, nonconvex optimization based on quasi-Newton updating, bundling and gradient sampling. Can be freely downloaded and used. Main developer: Michael L. Overton (Courant Institute, NY).
HELICOPTER BENCHMARK
The Helicopter setup consists of a base on which a long arm is mounted. The arm carries the helicopter body on one end and a counterweight on the other end. The arm can tilt on an elevation axis as well as swivel on a vertical (travel) axis. Quadrature optical encoders mounted on these axes measure the elevation and travel of the arm. The helicopter body, which is mounted at the end of the arm, is free to pitch about the pitch axis. The pitch angle is measured via a third encoder. Two motors with propellers mounted on the helicopter body can generate a force proportional to the voltage applied to them. The force, generated by the propellers, causes the helicopter body to lift off the ground and/or to rotate about the pitch axis. All electrical signals to and from the arm are transmitted via a slipping with eight contacts. The system is also equipped with a motorized lead screw that can drive a mass along the main arm in order to impose known controllable disturbances (the so-called Active Disturbance Option, ADO).
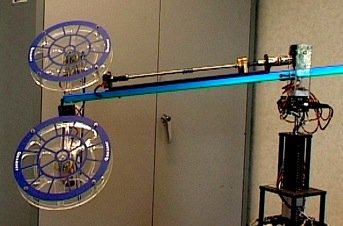
This Helicopter is a Quanser product.
THESIS / HDR
2026
2025
2024
Olga Iufereva, Thèse: Algorithmes de filtrage avec les observations distribuées par Poisson
2023
Florent Koudohode, Thèse: Commande basée évènement pour quelques équations aux dérivées partielles
2022
Mathieu Bajodek, Thèse: Analyse de stabilité de systèmes linéaires EDO-EDP interconnectés
2021
Mathias Serieye, Thèse: Contributions à la stabilisation des systèmes à commutation affine
2020
2019
Sabrina Hadjeras, Thèse: Commande hybride pour des convertisseurs de puissance
2018
Mohammed Safi, Thèse: Stabilité de Lyapunov de systèmes couplés impliquant une équation de transport
2017
Harmonie Leduc, Thèse: Contrôle adaptatif robuste. Application au contrôle d'attitude de satellites
2016
Saïd Zabi, Thèse: Modélisation et commande de l’anesthésie en milieu clinique
DEPARTMENT
Jobs / Interships
REJOINDRE
Notre équipe de recherche
Pour plus d’informations sur les offres d’emploi, vous pouvez contacter












