
Minnie in Merzouga, trajectory 22, replay 2
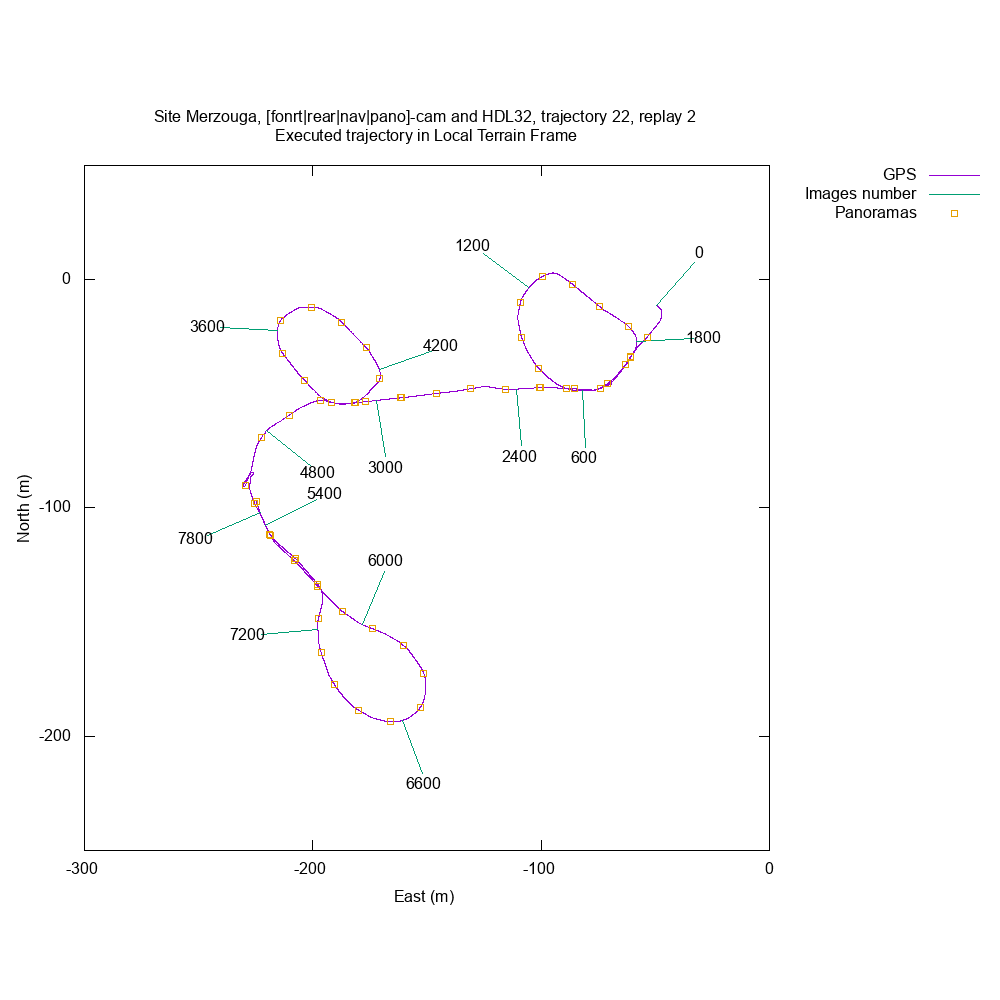
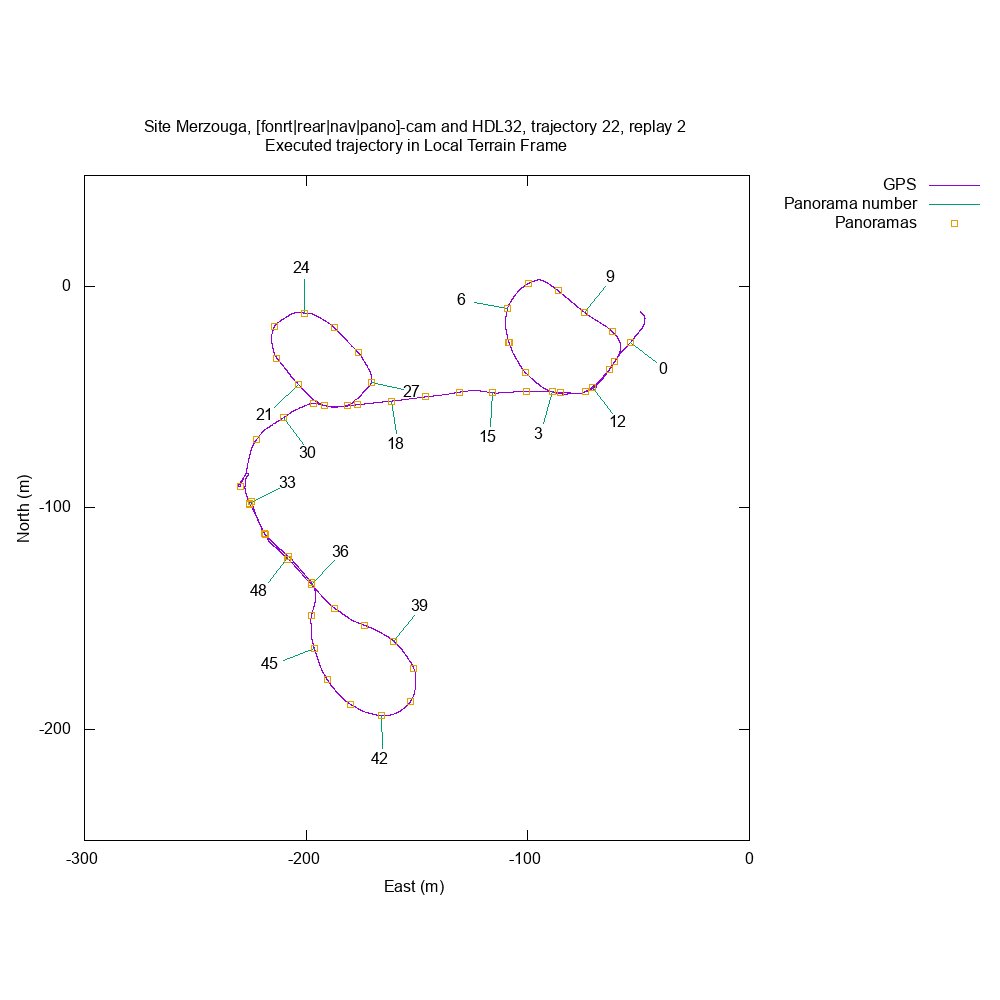
This is an execution of the first two thirds of trajectopry 22 at the speed of 0.3 m/s, with all Minnie sensors gathering data (the three stereo benches at 3 Hz, and the Velodyne HDL32 Lidar at 1 Hz - note the lidar stopped gathering data after 495 m). In particular. 360 degrees panoramas that comprise 5 stereo pairs are acquired with the nav_cam every 15 meters, the robot being stopped for about 40 seconds. While acquiring the panoramas, the front_cam and rear_cam do not gather any data (contrary to the Velodyne HDL32 lidar, which keeps gathering scans).
Unfortunately, once the robot moves again, it takes about 20 seconds for the front_cam and rear_cam to adjust their exposure, making their continuous exploitation a bit difficult -- to say the least.
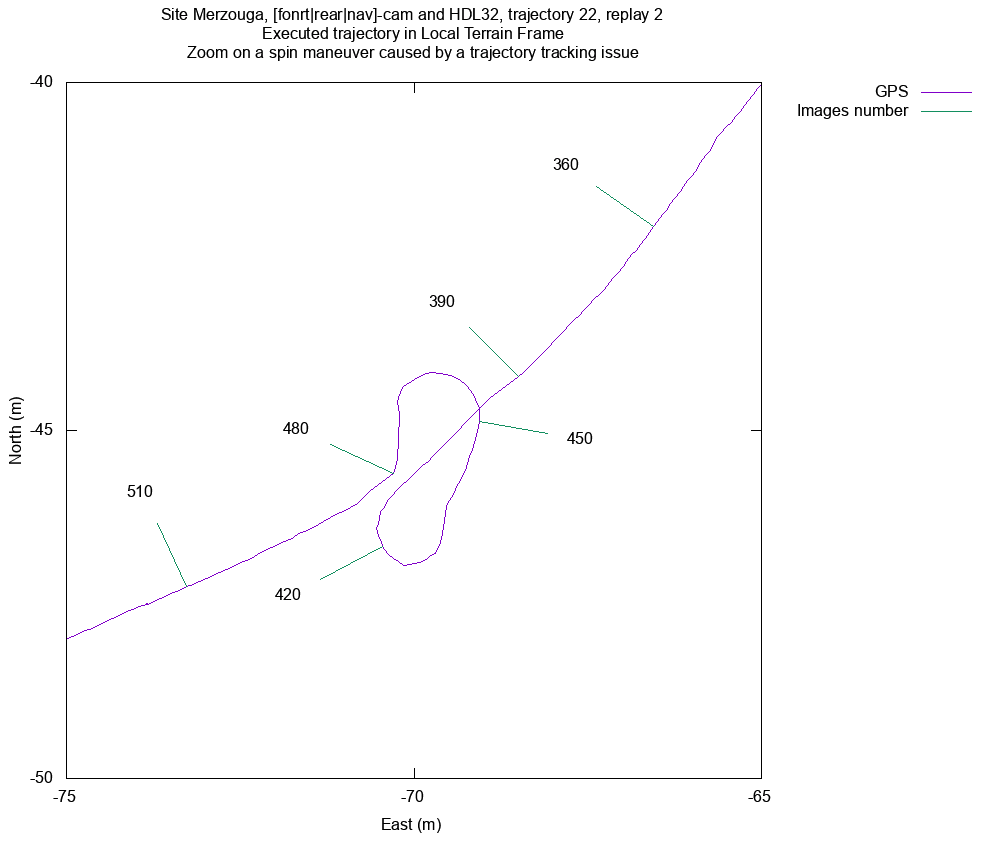
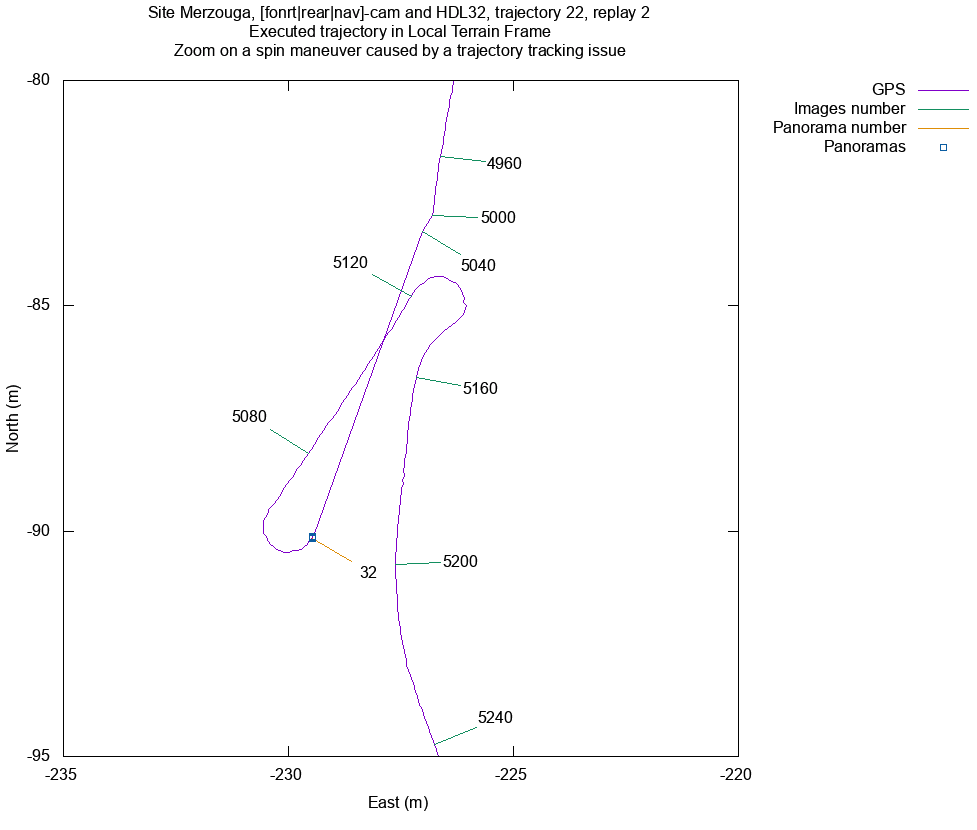
Besides, note that trajectory tracking issues have caused the execution of two spurious short loops (around image #400 and 5000, see zoomed pictures below), which provide some challenging sequences for the localisation & mapping processes.
 |
 |
Downloads: