
Overview |
Kesskess |
Mummy |
Merzouga |
Overview
This page briefly presents the three sites and the various trajectories along which data have been recorded. The provided information on the sites and trajectories may be helpful to select datasets to work on.
The page also provides a high resolution terrain ground truth for each of the sites, produced by the Pix4D sofware using images gathered by the eBee UAV. The digital surface map and the associated color orthoimage are geotiff files - GDAL library and suite of command-line utilities is the tool of choice to play with these data (both elevation and color information are also available in a heavy ASCII .xyz format). The absolute geographic coordinates of the ground truth maps and of the site frame are given, along with their estimated uncertainties.
Kesskess

This site is a mostly flat terrain, with a 3% slope going down southwards, traversed by a series of small dry stream beds. On flat areas the ground is mostly rocky, totally empty of vegetation, on which the robots leave no tracks. In the stream beds, which are more sandy, there are scarce mid-size scrubby dry tufts of grass.
|
|
|
|


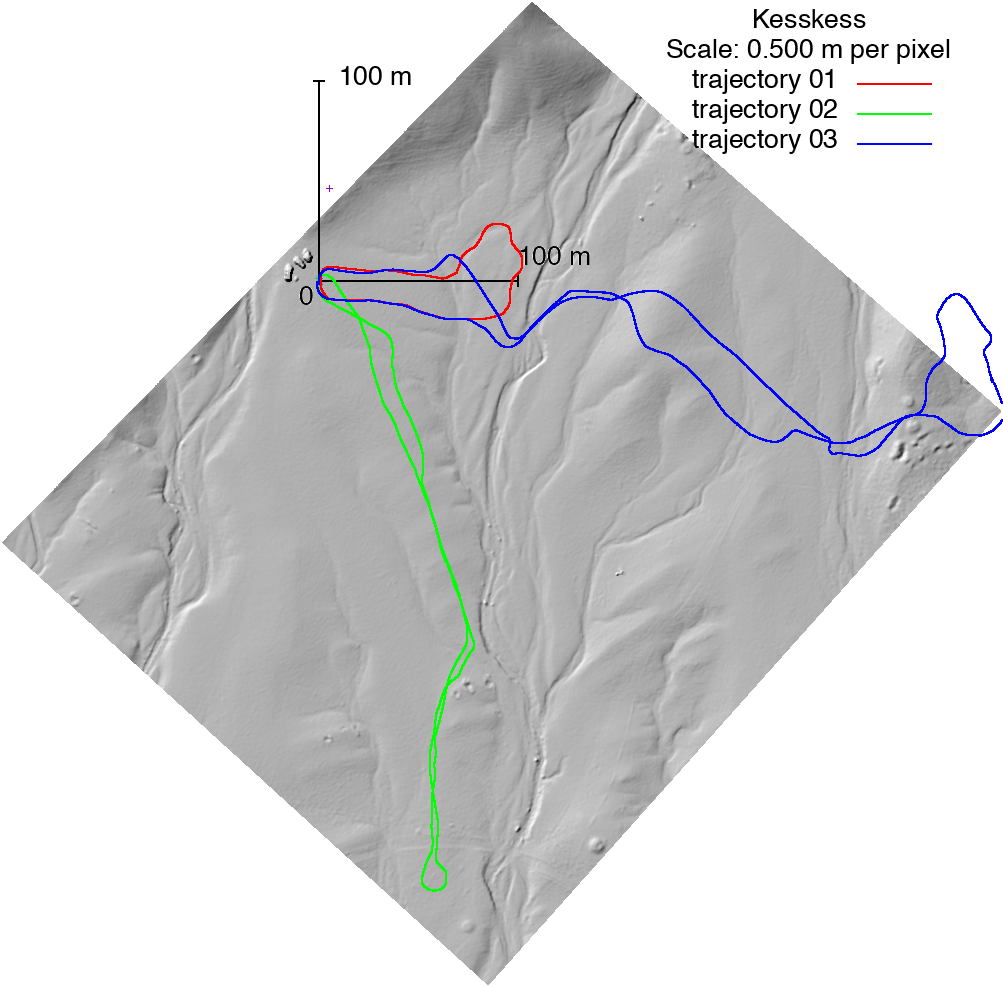
Mana and Minnie rovers at their start psotions (camera oriented eastwards, robots are heading southeast), south view from the robot start positions, and overlay of the acquisition trajectories on the site DSM
")
Three different data acquisition trajectories have been defined on this site, as illustrated on the right bird view image:
- Trajectory 01 is a short loop (approx. 250m long). The trajectory starts with a gentle downward slope, crosses a small dry stream bed, goes gently up and turns back to the start position (the robot elevations span a 3m range). See all datasets acquired along this trajectory.
- Trajectory 02 is a loop of about 700m long. It is rather a back and forth: along more than 50% of the return trajectory, the robot is very close to the forward trajectory. The trajectory forward segment goes glently down, and after crossing a dirt road (at a 10m lower altitude than the start position), it makes a U-turn and heads back to the start position. See all datasets acquired along this trajectory.
- Trajectory 03 is a nearly 1km long loop trajectory that goes accross the site main slope. It crosses several dry stream beds, and makes a loop turn around a small rocky hill before heading back. See all datasets acquired along this trajectory.
For these three trajectories the final position (and orientation) of the robot at the end is very close from the start position.
See all datasets acquired on the Kesskess site.
Download the terrain model (4.36 cm resolution, grid size w x h = 11517 x 11332):
-
digital surface map: 78 MB geotiff file
-
orthoimage: 116 MB geotiff file
-
digital surface map plus orhoimage in a 491 MB gzipped ASCII file
Reference frames:
- The absolute coordinates of the origin of the terrain ground truth (top left pixel of the raster grid structure, i.e. north west) are (East, North) = (387299.88m, 3475563.12m), UTM zone 30M (or 4º11' 8.09"W, 31º24'33.20"N). In the absence of precisely geo-referenced ground control points, the absolute precision of these coordinates is of the order of three meters (see details in the execution report of the Pix4D bundle adjustment / photogrammetry processes).
- The absolute coordinates of the selected site frame are (East, North, Up) = (387459.60m, 3475422.29m, 803.84m), UTM zone 30M. The GPS base station position has been set after averaging estimates during 30 minutes, and the reported standard deviation of the site frame absolute coordinates (East, north, Up) are equal to (1.32m, 1.14m, 2.58m). This information on the site reference frames is provided with each dataset.
Mummy

This site is a the one that exhibits the most diverse type of terrains, mixing rocky areas (with some sparse rocks the size of a shoebox) and sandy places on which cars (and robots) leave tracks, with scattered green grass tufts. The terrain also exhibits a series of gentle climbs (note on the panoramic picture the series of white tents deployed by our colleagues from the Facilitators project, to operate the DFKI robot Sherpa).
 |
 |
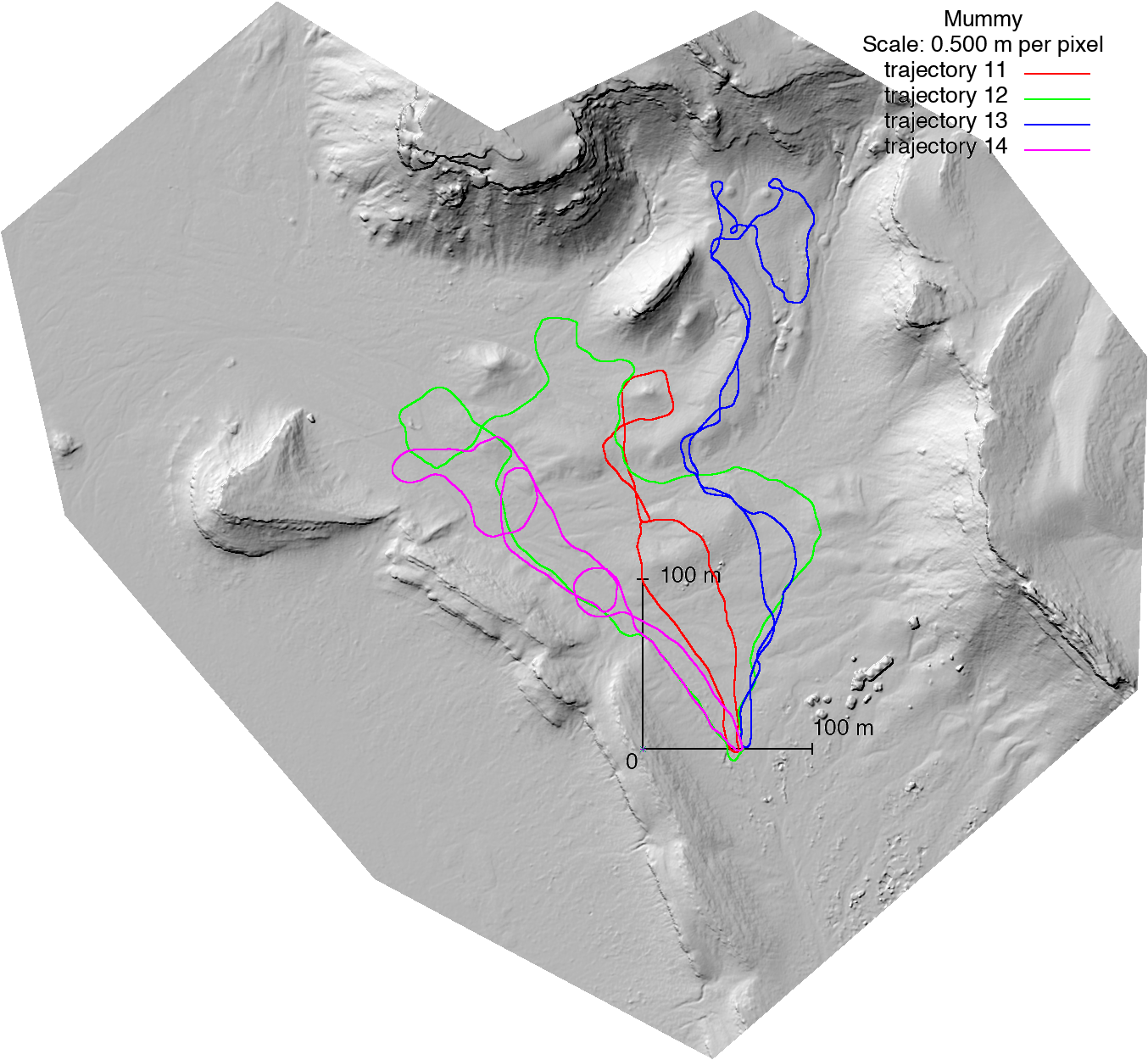 |
Mana and Minnie rovers at their start psotions (robots heading north-north-west), north-east view from the robots start position, and overlay of the acquisition trajectories on the site DSM
")
TODO: trajectories presentation, links to ground truth
Four different data acquisition trajectories have been defined on this site, as illustrated on the right bird view image:
- Trajectory 11 is an approximately 725m long loop. The trajectory starts with 100m of gentle downward slope, then climbs and descends two 2m hills, turns around a small mound, and returns to its starting position, crossing twice the forward path (the robot elevations span a about 3m range). See all datasets acquired along this trajectory.
- Trajectory 12... See all datasets acquired along this trajectory.
- Trajectory 13... See all datasets acquired along this trajectory.
- Trajectory 14... See all datasets acquired along this trajectory.
See all datasets acquired on the Mummy site.
Download the terrain model (4.42 cm resolution, grid size w x h = 15330 x 14151):
-
digital surface map: 185 MB geotiff file
-
orthoimage: 281 MB geotiff file
-
digital surface map plus orhoimage in a 360 MB gzipped ASCII file
Merzouga

")
TODO: trajectories presentation, links to ground truth
Two different data acquisition trajectories have been defined on this site, as illustrated on the right bird view image:
- Trajectory 21... See all datasets acquired along this trajectory.
- Trajectory 22... See all datasets acquired along this trajectory.
See all datasets acquired on the Merzouga site.
Download the terrain model (4.13 cm resolution, grid size w x h = 11321 x 10840):
-
digital surface map: 139 MB geotiff file
-
orthoimage: 128 MB geotiff file
-
digital surface map plus orhoimage in a 776 MB gzipped ASCII file