Yassine Ariba
Research
I conduct my research activity at the LAAS (the Laboratory for Analysis and Architecture of Systems) within the team MAC (Methods and Algorithms for Control). The LAAS is a unit of the CNRS, the french national center for scientific research. Team MAC does research in the field of systems and control theory. Theoretical works, as well as applied research, are carrying out to study dynamical systems for modeling, analysis and control design. Some topics considered in the team are : linear / nonlinear systems, robust control, hybrid systems, actuator saturation... A common objective is to develop constructive methods to various control problems while providing efficient computational algorithms.
Publications
All my publications are available on HAL. It is an online and open archive platform for scholarly documents from all academic fields.
My publications can be found here : my list
My last publications are also given here : recent papers
Research Topics
You can find below an idea of my current and past research topics (when I have time to update...).
Control of power converters [2021-today]
To be completed...
In collaboration with Manon Doré, Germain Garcia, Luca Zaccarian, Frédéric Gouaisbaut
Control of electromagnetic actuators [2017-today]
To be completed...
This work started along with the topic below "Nonlinear control of a pressure regulator", in collaboration with the company CSTM and the French national space agency CNES.
In collaboration with Frédéric Gouaisbaut, François Dugué, François Roux, Flavien Deschaux, Damien De Seze
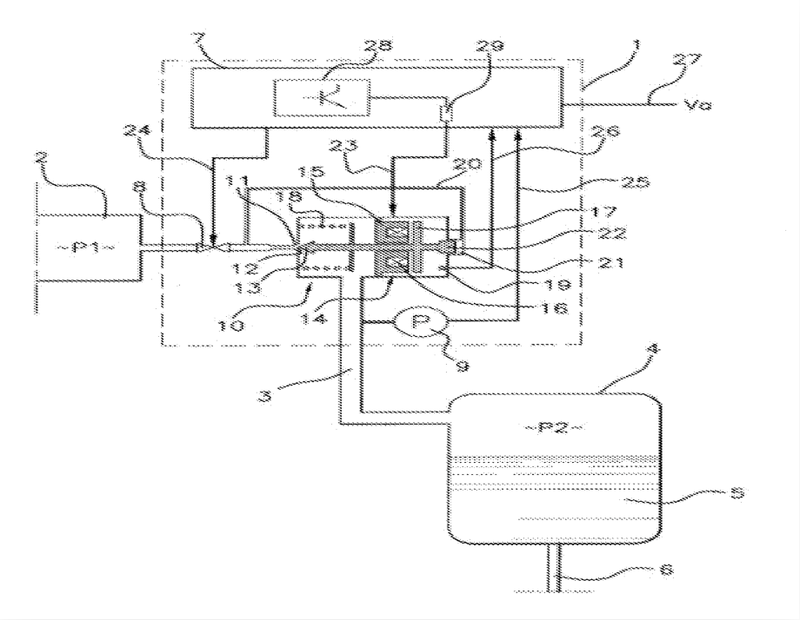
Nonlinear control of a pressure regulator [2017-2021]
CNES, launcher department, and CSTM have been working for several years on the development of an electronically controlled gas pressure reducer. Pressure reducer are used
in launchers to release helium from tanks at 400 bar to pressures of a few bars to a few dozen bars depending on the use. The work consists in developing nonlinear control
laws to, on the one hand, control the position of the valve of the electromagnetic actuator (EMA), and on the other hand, control the downstream pressure.
A PhD thesis has been dedicated to this topic : "Analyse et synthèse du système de commande d’un détendeur électronique pour applications spatiales" with Flavien Deschaux, co-supervised with Frédéric Gouaisbaut. The thesis was defended on September the 10th, 2020. All the work done is confidential. Part of this work has been patented.
In collaboration with Frédéric Gouaisbaut, Flavien Deschaux, Damien De Seze, François Dugué, François Roux
Glideslope guidance algorithm for space rendezvous [2015-2018]
During the last fifteen years, there has been an increasing demand to perform autonomous rendezvous, proximity or On-Orbit Servicing operations between an active chaser spacecraft and a passive target spacecraft. Autonomy means that new challenges have to be met when designing appropriate guidance schemes. In particular, simplicity of onboard implementation while preserving optimality in terms of fuel consumption, is fundamental. For the proximal rendezvous phase, the assumption that the distance between the chaser and the target is small enough compared to the distance between the target and the center of attraction a linearized model for relative dynamics may be used to simplify the design of guidance schemes. In addition, if the maneuvers carried out on-board provide short high thrust pulses approximated as impulsive maneuvers, the design of efficient guidance scheme for the general rendezvous problem may be greatly simplified. The impulsive approximation for the thrust consists of instantaneous velocity increments are applied to the chaser whereas its position remains unchanged.
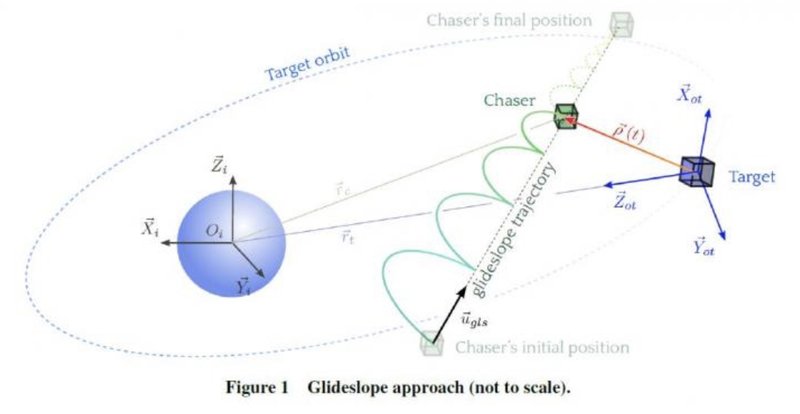
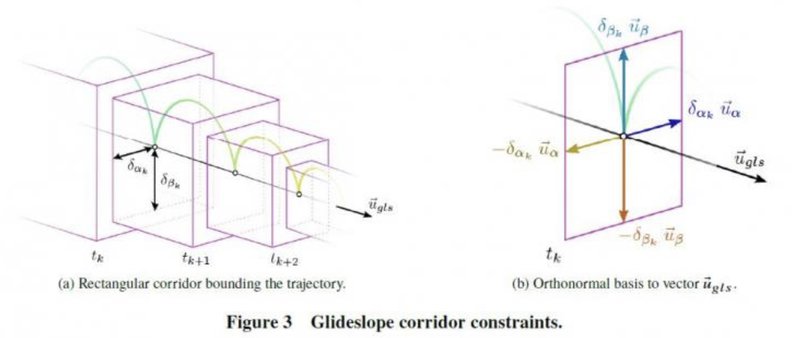
In this work, the classical glideslope algorithm (Hablani 2002) is revisited and a new approach is proposed to include optimization features in the design. Indeed, the usual methodology generates an impulsive maneuver sequences according to a predefined velocity profile that sets all positions where impulsive maneuvers will occur. As a result, the trajectory is entirely determined and the consumption and the excursion are by-products of the whole procedure. For that reason, we propose a new formulation of the glideslope guidance which aims at identifying relevant degrees of freedom. Getting some degrees of latitude allows to derive an optimization algorithm to minimize the fuel consumption. Besides, in all impulsive approaches mentioned above, the chaser’s trajectory exhibits hops between maneuvers that are inherent to the natural relative motion of the spacecraft. Inspired from the result of (Deaconu 2015), translating a constraint on the trajectory to a linear matrix inequality (using a suitable parametrization of the Yamanaka-Ankersen equations, a change of variable and a mathematical result on non-negative polynomials, a new methodology is proposed to control the amplitude of hops. This feature is a desirable asset since it enforces the chaser to remain close enough to the commanded path. It becomes even essential if a line-of-sight (LoS) constraint is required to keep the spacecraft into the visibility cone of the target’s sensors. In addition, the optimization problem formulation also enables us to readily take the maximum thrust of the chaser actuators into account. It is worth noting that while the classical glidelope guidance of Hablani is limited to circular orbits, the proposed version extends naturally to elliptical orbits. Moreover, the transfer time in the former approach is indirectly derived from the choice of the velocity profile, whereas it is a user-defined input in the present one and leads to a genuine fixed-time rendezvous approach. The contribution of this work is summarized as follows.
- Contrary to the classical glidelope approach, the proposed guidance algorithm is designed with the TH equations, and thus is also workable for eccentric orbits.
- The newglidelope algorithm results in a semidefinite optimization problem that minimizes the fuel consumption.
- The trajectory hops of the chaser are enclosed into a user-defined corridor. The resulting algorithm for off-axis glideslope is expressed as a semidefinite programming problem (SDP), which can be solved efficiently. This formulation can be further reduced to end into a linear programming problem (LP) when no constraints on the trajectory are considered or when the guidance is limited to a V-bar or R-bar approach.
This work is a part of the PhD Thesis : "Méthodes de guidage-contrôle robuste pour la phase d'approche entre deux véhicules orbitaux avec couplage des mouvements de translation et de rotation" of Laura Sofia Urbina Iglesias.
In collaboration with Denis Arzelier, Laura Sofia Urbina Iglesias
Time delay systems [2006-2015]
Stability of linear time-delay systems has been intensively studied in the last decades. A such success can be explained by their applied aspect. Indeed, many processes include dead-time phenomena such as biology, chemistry, economics, as well as population dynamics. Processing time and propagation time in actuators and sensors generally induce also such delays, especially if some devices are physically distant. That is the challenge of networked controlled systems as illustrated in Figure 1. Mathematical models of such systems are usually of the form of equation (1) or equation (2). We aim at designing stability conditions for this class of dynamic models.
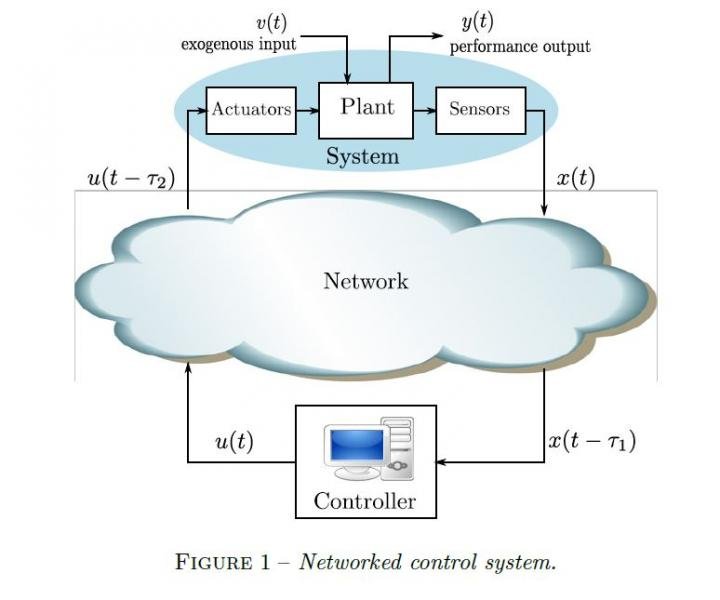
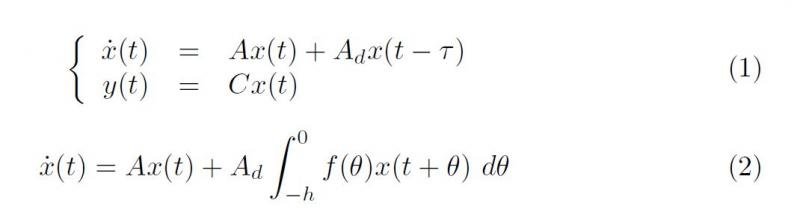
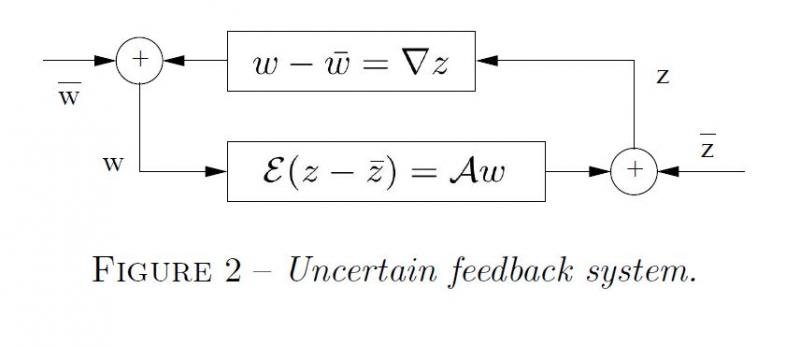
In our work, an original approach, based on robust control tools is considered : the quadratic separation method. This latter has been a fruitful framework to address the stability analysis of nonlinear and uncertain systems. We then adapt this framework to the stability analysis of time-delay systems. The key idea lies in rewording the system as a feedback interconnection as shown in Figure 2 and for which a stability criterion is known. In our case, the delay dynamic is embedded into uncertain operators in the feedback loop.
The original feature of our contribution is to design a set of additional auxiliary operators that enhance the system modelling and reduce the conservatism of the analysis. Our stability conditions are expressed in terms of linear matrix inequality conditions which can be efficiently solved with available semi-definite programming algorithms. Then, several stability conditions have been proposed, for systems with single/multiple discrete delays (independent-of-delay, delay-dependent and delay-range conditions) and distributed delays.
In collaboration with Frédéric Gouaisbaut, Dimitri Peaucelle, Alexandre Seuret
PhD Thesis [2006-2009]

Abstract
This thesis investigates the existing links between the control theory and the communication networks supporting the well-known communication protocol TCP (Transmission Control Protocol). The key idea consists in using the tools from control theory for the network traffic stabilization. Hence, this manuscript has naturally been turned towards two research lines: the design of stability and stabilization conditions for delay systems and the congestion control issue in IP network (Internet Protocol).
First, we have addressed the stability analysis of time-varying delay systems via two temporal approaches. On one hand, we consider the well-known Lyapunov-Krasovskii method in which new functionals are built according to original modelings of the system. To this end, we proceed to a model augmentation through delay fractionning or with the use of the system derivative. On the other hand, the stability is also assessed with an input-output approach, borrowing then tools from the robust control framework. More precisely, the time delay system is rewritten as the interconnection of a linear application with a uncertain matrix consisting in a set of operators that defines the former system. Thus, having revisited the quadratic separation principle, additional auxiliary operators are proposed in order to provide an enhanced modeling of the delayed dynamic of the system. In both cases, we aim at taking into account relevant informations on the system to reduce the conservatism of the stability analysis. All the stability criteria are expressed as linear matrix inequality conditions.
In a second part, the developed methodology is used to cope with the congestion phenomenon in a router supporting TCP communications. This end-to-end protocol is sensitive to packet losses and adjusts thereof its sending rate with respect to the AIMD (Additive-Increase Multiplicative-Decrease) algorithm. Based on the Active Queue Management (AQM) principle, we design a controller embedded into the router that monitors the packet losses. A such mechanism allows to stabilize the network traffic and to control the congestion phenomenon in spite of the delays induced by the network. All theoretical results are tested through nonlinear simulations in Matlab as well as some experiments under the network simulator NS-2.
Under the supervision of Frédéric Gouaisbaut and Yann Labit
The manuscript can be found here (in french) and the slides of my defense are here (in french).












