Stage
Génération de trajectoires pour un robot d’abrasion par jet d’eau
Date de publication
17.11.25
Contexte
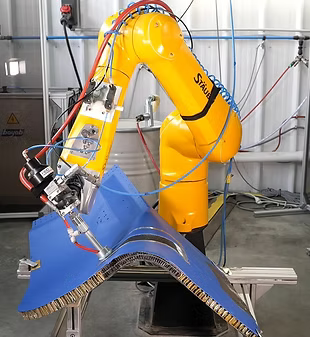
La société Bayab développe depuis plusieurs années des outils d’abrasion par jet d’eau sous haute pression. Le principal secteur d’activité est la maintenance aéronautique qui nécessite d’enlever plusieurs couches de peinture avant de réparer une pièce endommagée par la foudre ou par un choc. Le LAAS est un laboratoire de recherche multi-disciplinaire affilié au CNRS. Dans le cadre d’un projet collaboratif (JERICO), l’équipe Gepetto du LAAS et la société Bayab travaillent ensemble au développement d’un système composé d’un bras manipulateur portant un outil d’abrasion par jet d’eau permettant de traiter des pièces non planes comme des hélices par exemple. Bayab a par ailleurs développé un algorithme de calcul de trajectoires d’outil permettant de couvrir une surface définie en entrée par un opérateur.
Objectif du stage
L’objectif du stage est double : dans un premier temps, il s’agira de développer un algorithme de génération de trajectoire du robot permettant de suivre la trajectoire désirée de l’outil en évitant les singularités du robot et les collisions entre les divers corps en mouvement. Pour cela, le stagiaire s’appuiera sur le logiciel HPP développé par les chercheurs du LAAS et qui fournit des outils pour l’algorithmique du mouvement en robotique. Dans un second temps, le stagiaire testera les mouvements calculés sur le robot réel. Cette deuxième partie comportera une composante étalonnage qui permettra de disposer d’un modèle géométrique précis du robot et de son outil.
Déroulement du stage
Le stage se déroulera principalement dans les locaux de la société Bayab à Montrabé. Quelques visites au LAAS seront nécessaires au début pour recevoir une formation théorique et pratique sur l’algorithmique du mouvement en robotique et plus particulièrement sur l’utilisation du logiciel HPP.
Compétences requises
- Formation niveau master en robotique,
- une maîtrise du langage python,












