Jido
Obstacles Detection
Obstacle detection is a critical function both for security reasons and for interaction purposes. The most efficient sensor is once again the laser. Jido's laser can look forward (over 180 degrees) in an horizontal plan.
To partially overcome these limitations, the laser data are integrated in a local map by the aspect module and filtered using knowledge about the global map (segments and the virtual obstacles).
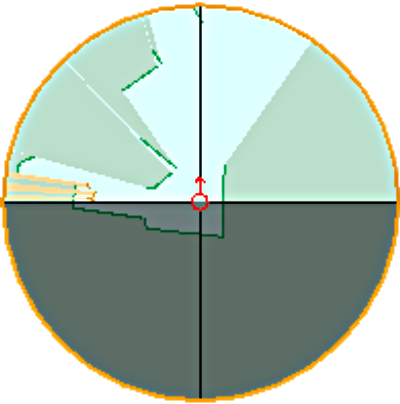
Thus, aspect exports, every 40 ms, a local map of the surroundings of the robot which represents the free space and which distinguishes static (ie, that belong to the environment or the virtual obstacles) and dynamic obstacles (probably visitors). This local map is permanently displayed on the bottom right of the interface.
Using this representation, aspect is able to inform the supervisor when the robot is surrounded by unpredicted ob- stacles. The red leds on the helmet flicker at a frequency proportional to the obstruction density of dynamic obstacles. To reinforce the assumption of presence near the robot, the supervisor can use the services of the sono module that detects motion all around the robot using the ultrasonic sensors. Unfortunately our ultrasonic sensors produce some audible noise which seem to disturb visitors interacting with the robot.
A much more robust people detector is offered by the module called isy (or,"I See You") which is able to detect faces in real time from a color camera image. The detector uses a cascaded classifier and a head tracker based on a particle filter. Isy controls the camera orientation in order to track the detected face. It informs the supervisor when it detects or looses a face.
From the direction and the size of the face it is able to estimate the 3D position of the detected person with a sufficient precision (about 10 cm for the height and 20 cm for the range).
The ambient light (weak and changing) of the space ship does not provide enough light; a ring of white leds fixed around the lens provide a range of detection of about three meters.