Perception Visuelle en Robotique
Détection, segmentation, suivi, identification d'humains et/ou d'objets
Il s'agit de détecter, segmenter, suivre temporellement et/ou reconnaître des structures d'intérêt (humains, objets, végétaux...) dans des images ou séquences vidéos en contextes robotiques : environnements et conditions perceptuelles non contrôlés, incertitudes, nécessité de traitement temps réel, reproductibilité des résultats, éventuellement embarquabilité. Les techniques sous-jacentes ont trait à la vision par ordinateur, l’apprentissage automatique, le traitement d’images, la perception 3D, etc.
Détection d'événements rares par vision
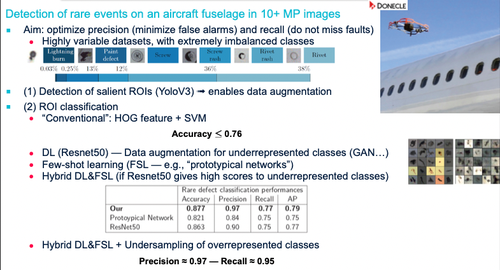
L'application est la détection de défauts sur des fuselages d'avion dans des images haute résolution capturées par des drones. La caractéristique essentielle du problème est la présence de classes très déséquilibrées (e.g., impacts de foudre vs défauts de peinture sur des rivets ou des vis).
- Une première étape consiste en l'extraction de régions d'intérêt saillantes
- Une classification est ensuite effectuée dans celles-ci par diverses techniques de vision par ordinateur et apprentissage automatique, permettant des scores de précision croissants.
Thèse de Doctorat de Julien Miranda (CIFRE avec l'entreprise DONECLE). Contact : Ariane Herbulot.
Détection et suivi de patterns et d'obstacles en environnements extérieurs
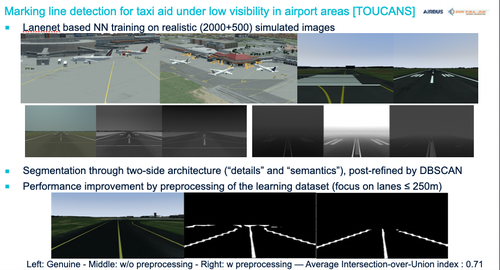
Durant la phase de taxi, les pilotes d'avion n'ont qu'une perception partielle de leur environnement. Les conditions météorologiques complexifient leur tâche. L'objectif est de détecter et suivre des lignes ou des obstacles dans des séquences vidéos délivrées par des capteurs visuels ou infra-rouge embarqués.
Projet DGA TOUCANS. Collaboration avec les entreprises AIRBUS et OKTAL-SE. Contact : Ariane Herbulot.
Suivi 2D rapide par détection (orienté données) et Comptage de personnes -- Suivi multi-cibles
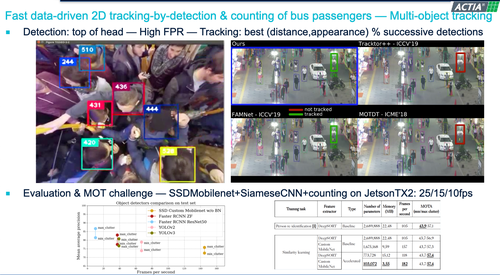
L'objectif est de détecter, compter, suivre des humains dans des transports en commun depuis des caméras azimutales, sous contraintes d'embarquabilité. Une évaluation de plusieurs détecteurs basés sur des réseaux de neurones profonds (de la littérature ou synthétisés ad hoc) permet de sélectionner un compromis intéressant précision / # fps / embarquabilité. Le suivi multi-cibles, basé sur des réseaux convolutionnels siamois, est évalué sur le MOT17 challenge. La cadence vidéo permise est de 25, 15 ou 10 images par secondes selon qu'1,2 ou 3 caméras sont simultanément utilisées.
Thèse de Doctorat de Claire Labit-Bonis (CIFRE avec l'entreprise ACTIA). Contact : Frédéric Lerasle.
Combinaison de Recherche Opérationnelle et Vision par Ordinateur pour la ré-identification de personnes dans des réseaux de caméras
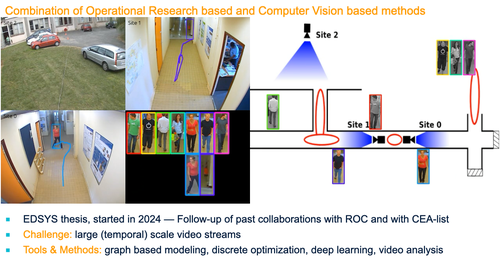
Ce travail, effectué en collaboration avec l'équipe ROC du LAAS-CNRS, s'inscrit dans la veine de travaux passés (avec le CEA-List, ROC...). L'objectif est d'adresser des problèmes de suivi et ré-identification à grande échelle, par combinaison de méthodes de recherche opérationnelle (graphes, optimisation discrète) et vision par ordinateur (apprentissage automatique, analyse vidéo).
Thèse de Doctorat de Cyrillle Equoy (Financement Université Toulouse III Paul Sabatier via l'École Doctorale EDSYS. Co-encadrement avec l'équipe ROC du LAAS-CNRS). Contact : Frédéric Lerasle.











