Activités Complémentaires
Autres collaborations et activités
Approches alternatives “energy-based” en commande prédictive
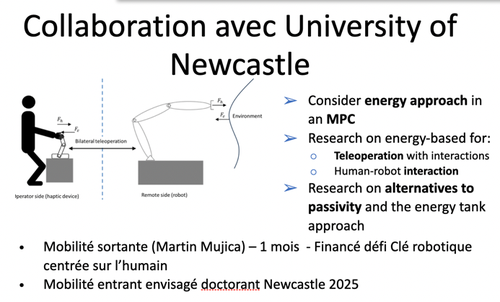
Ce travail se déroule dans le cadre d'une collaboration avec l'Université de Newcastle.
Contact : Martín Mujica. Remerciements au Défi-Clé Robotique Centrée sur l'Humain pour le financement d'une mobilité internationale.
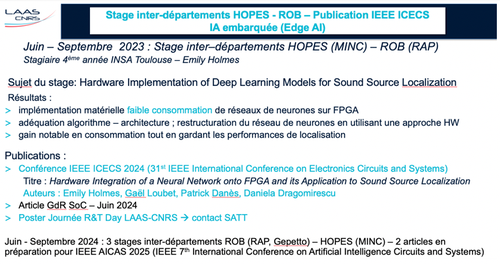
Implémentation matérielle d'algorithmes d'inférence à base de réseaux de neurones profonds
Dans le passé, RAP a développé des capteurs intelligents intégrant le traitement de données brutes sur des architectures matérielles-logicielles de type système sur puce embarquées au plus près des transducteurs. Les applications concernaient par exemple : le SLAM visuel rapide (thèses de doctorat de F. Brenot et D. Tortei, co-encadrement par J. Piat, P. Fillatreau (UTTOP Tarbes) et M. Devy) ; la détection d'obstacles par ceinture de micro-caméras (thèse de doctorat de A. Alhamwi, encadrée par J. Piat et M. Devy) ; la localisation de sources sonores par un réseau de microphones (stage de V. Lunati, encadré par P. Danès).
La collaboration en cours avec l'équipe MINC du LAAS-CNRS prolonge et renouvelle ces activités passées. L'objectif est d'implémenter sur FPGA des algorithmes basés sur des réseaux de neurones profonds pour la localisation de sources sonores.
Contact : Patrick Danès
Robots manipulateurs open-source modulaires imprimés en 3D

Cette collaboration entre les équipes GEPETTO et RAP du LAAS-CNRS vise à concevoir et prototyper des robots manipulateurs modulaires imprimés en 3D pour l'enseignement (à l'IUT GEII et à l'UPSSITECH de l'Université Toulouse III Paul Sabatier) ou la recherche. Jusqu'à présent, des robots SCARA 4DOF et des robots 3DOF standard (6DOF standard sans poignet sphérique) ont été construits.
Contact : Martín Mujica. Remerciements au service I2C du LAAS-CNRS et à la Maison de la Formation Jacqueline Auriol (MFJA).











