Conception mécatronique
L'équipe Gepetto considère la conception mécatronique de robots comme une composante essentielle de la génération automatique de mouvements. Les deux principales cibles de cette activité sont les robots humanoïdes de taille humaine comme le robot TALOS et des robots quadrupèdes de petite taille tels que Solo ou Sassa.
Les robots humanoïdes à taille humaine
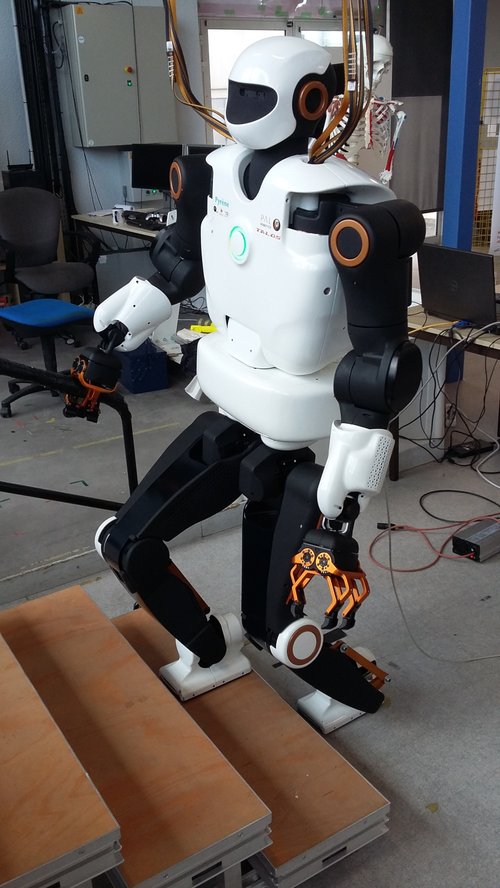
Le robot TALOS a été construit dans le cadre de l'ERC Actanthrope de Jean-Paul Laumond. Son développement est fondé sur l'expérience acquise grâce au robot HRP-2 et aux années de développement d'algorithmes de commande de la marche. Une caractéristique importante de Talos est sa puissance lui permettant de manipuler des outils à main comme des perceuses et d'interagir physiquement avec l'environnement grâce à ses capteurs de couple embarqués dans chaque articulation. Dans le cadre de l'ERC, Gepetto a établi les spécifications techniques du robot en terme de puissance des moteurs notamment, par des simulation numériques de diverses tâches comme la montée d'escalier ou le port de charge bras tendu. Un appel d'offre a ensuite été lancé. C'est la société PAL Robotics à Barcelone qui a été choisie pour la construction du robot.
TALOS mesure 1,75m, pèse 100 kg, est doté de 32 degrés de liberté actionnés par des moteurs. Il est muni de deux processeurs fonctionnant sous ROS-1. Une description détaillée est fournie dans l'article suivant:
- “TALOS: A new humanoid research platform targeted for industrial applications”, Olivier Stasse, Thomas Flayols, Rohan Budhiraja, Kevin Giraud-Esclasse, Justin Carpentier, Joseph Mirabel, Andrea Del Prete, Philippe Souères, Nicolas Mansard, Florent Lamiraux, J-P Laumond, Luca Marchionni, Hilario Tome, Francesco Ferro, Int. Conf. on Humanoid Robots, 2017. (https://hal.science/hal-02995796/document).
Le robot a servi de plate-forme de recherche dans le projet européen MEMMO pour développer le premier algorithme de commande prédictive corps complet avec retour d'état pour ce type de robot:
- “Whole-Body Model Predictive Control for Biped Locomotion on a Torque-Controlled Humanoid Robot”,
Ewen Dantec, Maximilien Naveau, Pierre Fernbach, Nahuel A. Villa, Guilhem Saurel, Olivier Stasse, Michel Taïx, Nicolas Mansard, Humanoids 2022: 638-644
https://hal.science/hal-03724019v2/file/Humanoid_final.pdf
Grâce à des travaux poussés sur la modélisation et l'identification de flexibilités au niveau de la hanche, TALOS est aujourd'hui capable de marcher à 40 cm/s.
- “Torque controlled locomotion of a biped robot with link flexibility”, Nahuel A Villa, Pierre Fernbach, Maximilien Naveau, Guilhem Saurel, Ewen Dantec, Nicolas Mansard, Olivier Stasse, International Conference on Humanoid Robots (Humanoids), 2022.
Les quadrupèdes
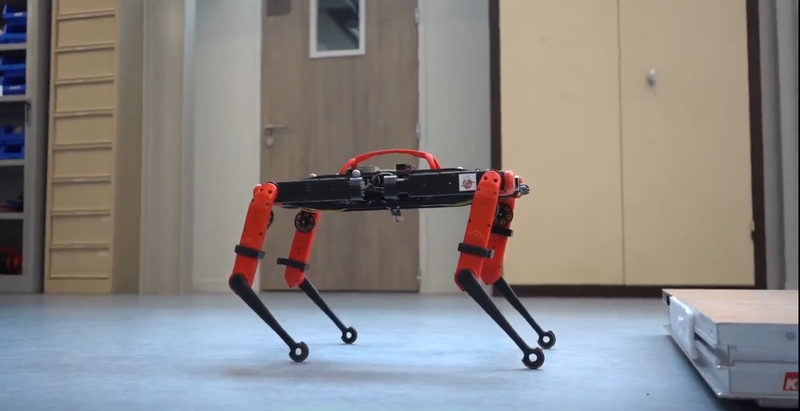
A plus petite échelle, nous collaborons avec l'Institut Max Planck afin de disposer de robots facilement manipulables par les étudiants, réparés et modifiés selon les besoins.
Cela a conduit à la création de plusieurs petits robots tels que : Solo, Bolt, Sassa. Cette activité s'inscrit dans le cadre de l'« Open Dynamic Robot Initiative ».
Actionneurs bio-inspirés
Un autre axe de recherche est poursuivi par Bertrand Tondu sur les muscles biologiquement inspirés (McKibben) et sur de nouveaux actionneurs à base de polymères.












