Analyse et compréhension du mouvement humain
A l’aide d’outils développés principalement pour la robotique, nous tentons de comprendre les lois qui régissent le mouvement humain.
Nouveaux capteurs pour l’analyse du mouvement humain
L’objectif est de développer de nouveaux systèmes de capture de mouvements à bas coût, portables et précis pour l’analyse du mouvement en dehors du cadre contraint du laboratoire. Nous intégrons des données de caméras RGB/RGB-D, de centrales inertielles ou visuo-inertielle et de capteurs d’efforts pour reconstruire la cinématique et la dynamique de personnes en situation de handicap ou souffrant de troubles musculosquelettiques et travaillant dans l’industrie manufacturière. Chacun de ces capteurs a des avantages (coût, portabilité, fréquence, …) et des inconvénients (dérive, bruit élevé, occlusion, …). Nous travaillons donc à développer des filtres adaptatifs, des processus d’optimisation et à utiliser de l’apprentissage machine pour fusionner les données de ces capteurs afin de piloter notre modèle biomécanique le GEPETTO-mannequin. Le mouvement reconstruit sert ensuite à l’analyse clinique ou ergonomique du geste avec la reconstruction de critères tels que le « Frenchay arm test » ou le « Rapid Upper Limbs Assessment test ».
Plusieurs de ces algorithmes et modèles sont disponibles grâce à notre boîte à outils COSMIK-rt (Constrained Open Source Multibody Inverse kinematics- real-time).
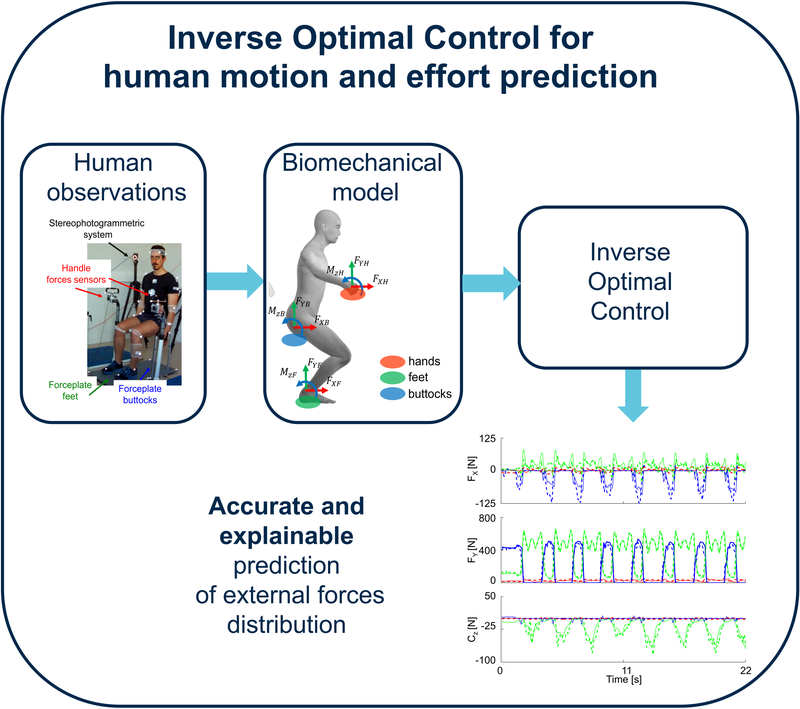
Prédiction et compréhension du mouvement humain
Ce travail vise à prédire le plus finement possible les trajectoires articulaires et les forces de contact et musculaires observées chez des opérateurs industriels, des sujets sains et pathologiques. Pour ce faire, a contrario des méthodes fondées sur de l’apprentissage machine qui ne permettent pas d’expliquer le mouvement, nous visons à déterminer quelles sont les fonctions de coût biomécaniques optimisées par l’humain pour produire des mouvements naturels. Ce problème est nommé dans la littérature « contrôle optimal inverse ». Nous développons donc de nouvelles méthodes de contrôle optimal inverse permettant de prendre en compte les erreurs de modélisation, de valider ou invalider les bases de fonctions de coûts retenues ou d’être plus robuste au bruit du de mesure mouvement humain.
Nous étudions plusieurs tâches et populations. Les résultats de ces analyses ont été validés expérimentalement et ont, par exemple, mis en évidence de manière formelle les influences de la minimisation de l’énergie dans le maintien de l’équilibre chez l’humain. Également, nous avons montré qu’il existait des fonctions de coût permettant de répartir les efforts de manière optimale lors de tâches multi-contact comme le lever de chaise de patients paraplégiques ou pour répartir des efforts musculaires lors de la marche de patients hémiparétiques. Les fonctions de coût identifiées permettent non seulement de reproduire le mouvement humain mais peuvent aussi être utilisées comme une nouvelle méthode permettant la quantification d’un point de vue neuromusculaire du geste industriel assisté. L’assistance du geste se réfère ici à l’utilisation de robots collaboratifs. C’est à dire que l’analyse des variations des fonctions de coûts sous-jacentes au mouvement assisté ou non-assisté peuvent donner une indication sur la transparence du contrôleur du système d’assistance.