Human Robot Interactions/Cooperations
Consider all decisional aspects to build a consistent architecture dedicated to human-robot interaction management
Research Topics
Consider all decisional aspects to build a consistent architecture dedicated to human-robot interaction management:
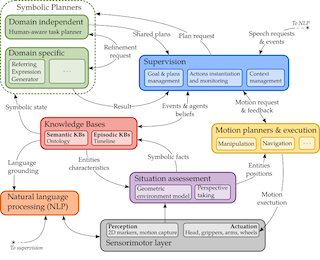
- Knowledge management and reasoning
- (Geometric) Situation Assessment
- Action and task monitoring
- Communication (Referring Expression Generation (REG))
- Supervision
- Quality of interaction
- Expectations management
- Planning (motion and task)
=> All of these taken into account humans' expectations and perspective
Challenges

- Take into account an overall interaction and all its contingencies, that means enabling the robot to handle its own part of the task but also to monitor the humans' ones
- Consider not only one-to-one but also one-to-many interactions, that means being able to handle interruption and quality of interaction
- Consider short-term as well as long-term interaction and more precisely the social context of the interaction and its implication
- Interdisciplinary work with psychologists and philosophers: take inspiration from joint action theory, commitments theory, communication theory,...
=> The idea is not to imitate the human-human case but to better understand human’s expectations












