Side Activities
Side collaborations and activities
Alternative energy-based approaches to model predictive control
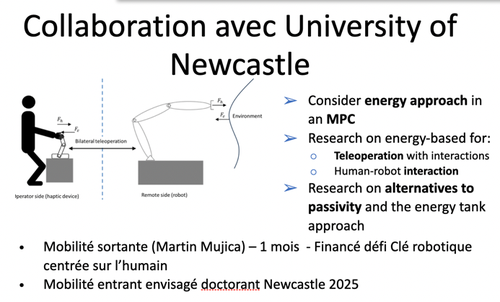
This work takes place within a collaboration with University of Newcastle.
Contact: Martín Mujica. Warm thanks to Key Challenge on Human-centered Robotics for funding an international mobility.
Hardware implementation of DNN based inference algorithms
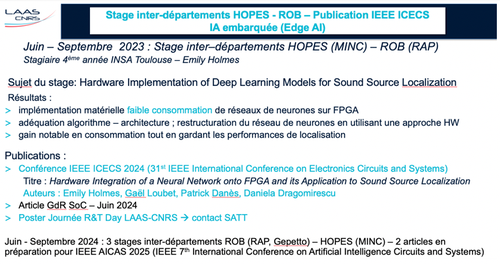
In the past, RAP developed smart-sensors featuring raw data processing on embedded system-on-chip hardware-software architectures close to the transducers. Applications included: fast Kalman-based visual SLAM (Doctoral theses of F. Brenot and D. Tortei, co-supervision by J. Piat, P. Fillatreau (UTTOP Tarbes) and M. Devy); obstacle detection by micro-camera belt (Doctoral thesis of A. Alhamwi, supervised by J. Piat and M. Devy); sound source localization by an array of microphones (Internship of V. Lunati, supervised by P. Danès).
The ongoing collaboration with the MINC team of LAAS-CNRS extends and renews these past activities. The aim is to implement on FPGA algorithms based on deep neural networks for sound source localization.
Contact: Patrick Danès
3D-printed fully modular open-source manipulator robots

This collaboration between the GEPETTO and RAP teams of LAAS-CNRS aims at designing and prototyping 3D-printed modular manipulator robots for teaching (at IUT GEII and UPSSITECH School of Engineering of Toulouse III Paul Sabatier University) or research. So far, SCARA 4DOF robots and standard 3DOF robots (i.e., standard 6DOF w/o spherical wrist) have been built.
Contact: Martín Mujica. Warm thanks to I2C staff of LAAS-CNRS and Maison de la Formation Jacqueline Auriol (MFJA).












