Analysis and understanding of human movement
Using tools developed primarily for robotics, we try to understand the laws that govern human motion.
New sensors for human movement analysis
The objective is to develop new low-cost, portable and accurate motion capture systems for motion analysis outside the constrained framework of the laboratory. We integrate data from RGB/RGB-D cameras, inertial or visuo-inertial units and force sensors to reconstruct the kinematics and dynamics of people with disabilities or suffering from musculoskeletal disorders and working in the manufacturing industry. Each of these sensors has advantages (cost, portability, frequency, etc.) and disadvantages (drift, high noise, occlusion, etc.). We are therefore working to develop adaptive filters, optimization processes and to use machine learning to merge the data from these sensors in order to drive our biomechanical model, the GEPETTO-mannequin. The reconstructed movement is then used for clinical or ergonomic analysis of the gesture with the reconstruction of criteria such as the "Frenchay arm test" or the "Rapid Upper Limbs Assessment test". Many of these algorithms and models are available through our COSMIK-rt (Constrained Open Source Multibody Inverse kinematics- real-time) toolbox.
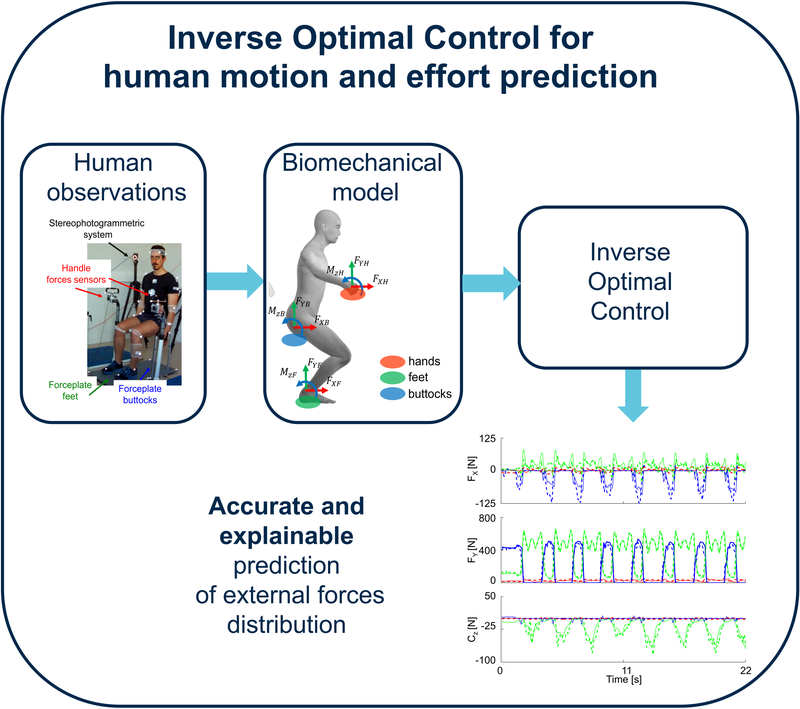
Prediction and understanding of human movement
This work aims to predict as finely as possible the joint trajectories and the contact and muscular forces observed in industrial operators, healthy and pathological subjects. To do this, unlike methods based on machine learning that do not allow to explain the movement, we aim to determine which are the biomechanical cost functions optimized by humans to produce natural movements. This problem is called in the literature "inverse optimal control". We therefore develop new inverse optimal control methods to take into account modeling errors, to validate or invalidate the cost function bases retained or to be more robust to the noise of human movement measurement. We study several tasks and populations. The results of these analyses have been experimentally validated and have, for example, formally highlighted the influences of energy minimization in maintaining balance in humans. We also showed that there were cost functions that could optimally distribute efforts during multi-contact tasks such as chair-raising for paraplegic patients or for distributing muscular efforts during walking for hemiparetic patients. The identified cost functions not only reproduce human movement but can also be used as a new method for quantifying assisted industrial gestures from a neuromuscular point of view. Gesture assistance refers here to the use of collaborative robots. That is to say, the analysis of the variations of the cost functions underlying the assisted or unassisted movement can give an indication of the transparency of the assistance system controller.