Hardware design
The Gepetto team considers the mechatronic design of robots as an essential component of the automatic generation of movements. The two main targets of this activity are human-sized humanoid robots like the TALOS robot and small quadruped robots such as Solo or Sassa.
Human sized humanoid robots
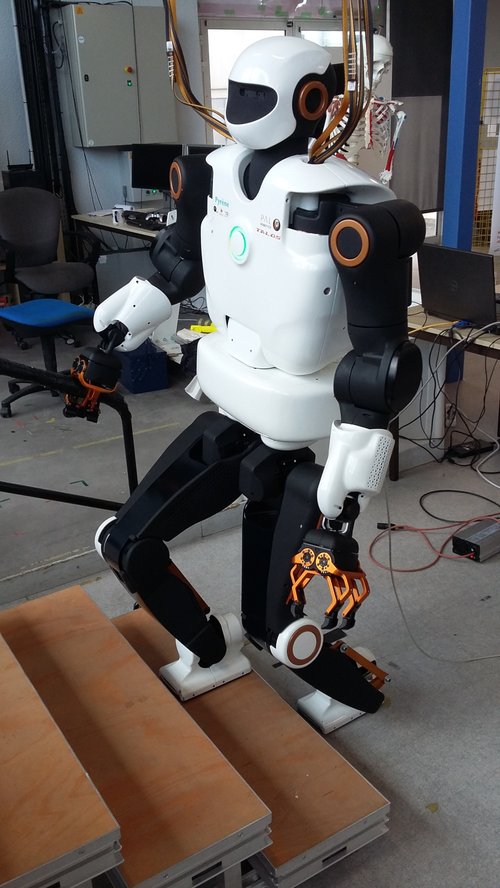
The TALOS robot was built as part of Jean-Paul Laumond's Actanthrope ERC project. Its development is based on the experience gained from the HRP-2 robot and years of development of gait control algorithms. An important feature of Talos is its power allowing it to manipulate hand tools like drills and to physically interact with the environment thanks to its torque sensors embedded in each joint. As part of the ERC, Gepetto established the technical specifications of the robot in terms of motor power in particular, through numerical simulations of various tasks such as climbing stairs or carrying a load with an outstretched arm. A call for tenders was then launched. The company PAL Robotics in Barcelona was chosen to build the robot.
TALOS measures 1.75m, weighs 100kg, has 32 degrees of freedom operated by motors. It is equipped with two processors running ROS-1. A detailed description is provided in the following article:
- “TALOS: A new humanoid research platform targeted for industrial applications”, Olivier Stasse, Thomas Flayols, Rohan Budhiraja, Kevin Giraud-Esclasse, Justin Carpentier, Joseph Mirabel, Andrea Del Prete, Philippe Souères, Nicolas Mansard, Florent Lamiraux, J-P Laumond, Luca Marchionni, Hilario Tome, Francesco Ferro, Int. Conf. on Humanoid Robots, 2017. (https://hal.science/hal-02995796/document).
The robot served as a research platform in the European MEMMO project to develop the first whole-body model predictive control algorithm with state feedback for this type of robot:
- “Whole-Body Model Predictive Control for Biped Locomotion on a Torque-Controlled Humanoid Robot”,
Ewen Dantec, Maximilien Naveau, Pierre Fernbach, Nahuel A. Villa, Guilhem Saurel, Olivier Stasse, Michel Taïx, Nicolas Mansard, Humanoids 2022: 638-644
https://hal.science/hal-03724019v2/file/Humanoid_final.pdf
Thanks to extensive work on modeling and identifying flexibilities at the hip level, TALOS is now capable of walking at 40 cm/s.
- “Torque controlled locomotion of a biped robot with link flexibility”, Nahuel A Villa, Pierre Fernbach, Maximilien Naveau, Guilhem Saurel, Ewen Dantec, Nicolas Mansard, Olivier Stasse, International Conference on Humanoid Robots (Humanoids), 2022.
Quadruped robots
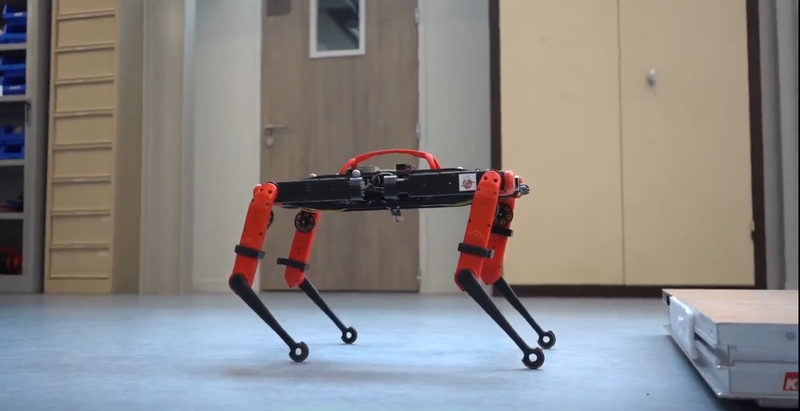
On a smaller scale, we have been collaborating with the Max Planck Institute in order to have robots which can be easily handled by students, fixed and modified as needed.
This has led to the creation of several small robots such as: Solo, Bolt, Sassa. This activity is part of the "Open Dynamic Robot Initiative".
Biologically inspired actuators
Another line of research has been pursued by Bertrand Tondu on biologically inspired muscles (McKibben) and on new polymer based actuator.












