|
All videos are in MPEG-4 format. They can be viewed with Quicktime, mplayer, VLC...
(3 min 30 sec sequence - comments in english)
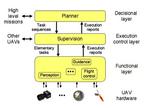
This video presents the european Comets IST project final
demonstration, that took place in Lousa (Portugal) in May 2005. The demo
involves two helicopters and a blimp in a fire detection, confirmation
and monitoring scenario. The video depicts the overall system
architecture and the UAVs architecture.
(2 min 12 sec sequence - no sound)
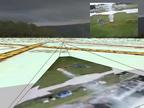
This video shows Karma flying along with Heliv and Marvin over a fire, during the second yearly experiments of the
european Comets
project, in the airfield of
Lousa near Coimbra, Portugal.
(3 min 47 sec sequence - no sound)
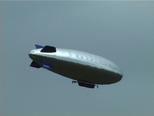
This video was recorded in May 2003, during some experiments of the
european Comets project,
organized by ADAI in the airfield of
Lousa near Coimbra, Portugal. Karma has been totally upgraded (new
enveloppe, new gondola, new motors), but still flies here under the
control of a pilot. There was a wind of about 10 km/h blowing, which is
the upper limit Karma can bear with: its trajectories are not very
stable.
(1 min 13 sec sequence - no sound)
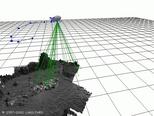
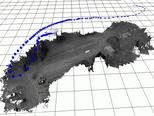
This movie shows the building of a digital elevation map during a
tethered flight over the garden and parking of the lab. This model is
built on the sole basis of the on-board stereovision bench images: no
gyros, IMU or GPS data has been used here. The blimp is localized with a
Simultaneous Localization And Mapping (SLAM) algorithm: landmarks are
detected and localized as it moves, and simultaneously used to estimate
the blimp position (the landmarks are shown with an ellipsoid that
represents their uncertainty on the video).
Related publications
(1 min 35 sec sequence - no sound)
This video was recorded during the test flights of Karma in the airfield
of Graulhet, near Toulouse, in August 2002. The blimp is remotely
controlled by an operator, while the on-board CPU only gathers the data
measured by the GPS, the two inclinometers, the compass and the two
cameras of the stereo bench.
Karma flies along three loops in this sequence, at altitudes ranging from
a few meters up to about 25 meters. At the end of the third loop, its
speed is almost reduced to zero.
Related publications
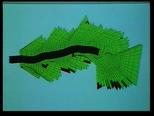
(4 min sequence - comments in English)
We find this one pretty neat (it actually took us some time to achieve
it :-). It shows Lama reaching a distant goal, adapting its navigation
mode according to the kind of terrain it traverses. Two local navigation
modes are depicted, and the way they are driven by a navigation planner
that sets the sub-goal to reach is shown. While navigating, Lama localizes
itself thanks to the visual motion estimation technique.
Related publications
A lot ! (see here) But the following one
is a good synthesis.
|
[Lacroix 2002]
| [related pages] [abstract] [download] [BibTeX] [top] |
|
S. Lacroix, A. Mallet, D. Bonnafous, G. Bauzil, S. Fleury, M. Herrb and R. Chatila. Autonomous Rover Navigation on Unknown Terrains: Functions
and Integration. In International Journal of Robotics Research, 21(10-11), pages 917-942, 2002.
|
(1 min 20 sec sequence - no sound)
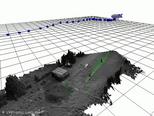
This video illustrates the results of the visual motion estimation
algorithm (shown in green) with the rover Lama during a 50 m long
loop, compared with the position estimated by odometry (in red). Worth
to notice is the behavior of both estimators when the rover slips
laterally on the small rocky hill, and the estimated positions when the
rover comes back to its starting point. The visual motion estimator
undoubtedly beats odometry.
Related publications
|
[Mallet 2000]
| [related pages] [abstract] [download] [copyright] [BibTeX] [top] |
|
A. Mallet, S. Lacroix and L. Gallo. Postion Estimation in Outdoor Environments using Pixel
Tracking and Stereovision. In International Conference on Robotics and Automation, pages 3519-3524. San Francisco, CA (USA), 2000.
|
(3 min 20 sec sequence - no sound)
This one is not very illustrative, as it only shows Lama roving without
any visual explanation of the involved algorithms. It was recorded in
the garden of the Cité de
l'Espace museum of Toulouse, during a week-end organized within the
temporary "Destination Mars" exposition. It was the first time that Lama
evolved autonomously in public: very impressed, Lama was not in its best
shape, and only accepted to evolve slowly, wavering along its paths.
Related publications
|
[Lacroix 2000b]
| [related pages] [abstract] [download] [BibTeX] [top] |
|
Simon Lacroix, Anthony Mallet, David Bonnafous, Gérard Bauzil, Sara Fleury, Matthieu Herrb and Raja Chatila. Autonomous Rover Navigation on Unknown
Terrains. Demonstrations in the Space Museum ``Cité de
l'Espace'' at Toulouse. In 7th International Symposium on Experimental Robotics. Honolulu, HI (USA), 2000.
|
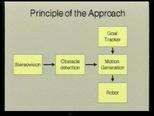
(3 min sequence - comments in english)
This film illustrates how Lama can avoid sparse obstacles, using a potential field based reactive
navigation approach. The principle of the approach is depicted, and an
exemple of a nice obstacle avoidance is shown.
Related publications
(1 min 30 sec sequence - comments in english)
This one is now an oldie! It is extracted from a nice TV report
entitled "Cars on Mars", realized and broadcasted by the BBC in the
"Tomorrow's world" programme.
It shows Adam reaching autonomously a visual target, modelling its
environment with a home made 3D scanning laser range finder, and
planning trajectories on the built digital elevation map. At that time,
it took 3 minutes to gather a 100x100 points 3D image...
Related publications
| |
General Information
Robots
Rovers Navigation
Autonomous Blimps
Multi-Robot Cooperation
|